 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA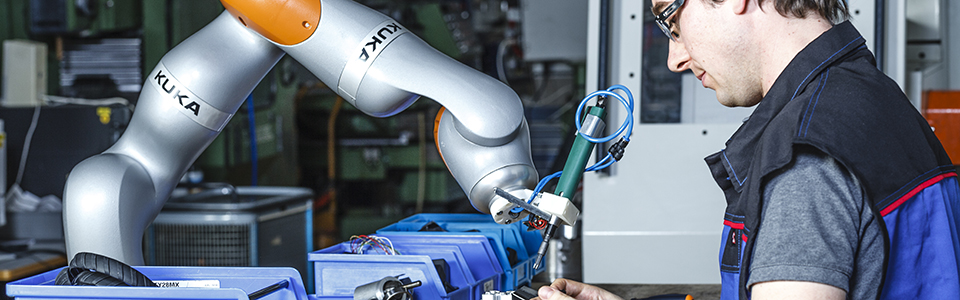
Safe Human-Robot Collaboration with Assistive Robots
Assistive robots, i.e. robots that share the working environment with humans, enable assembly tasks to be partially automated even in cases where full automation is not economically practicable. Reasons for this include unstructured, working environments that were previously manual, high flexibility requirements, undefined components such as flexible parts, or simply too little space.
Services
We help you with everything from designing an assistive robot system to its approval in your production facility:
- Development of a safety concept and interaction concept, corresponding layout, tool design and selection of suitable sensors for recognizing tolerances
- Adaption of our assembly assistant environment to your requirements
- Implementation of image-processing and control algorithms to enable robust process execution
Advantages
- Ability to share the workload, therefore enabling man to use his cognitive abilities to master unstructured environments and flexibility requirements. At the same time, man takes full advantage of the robot’s strength, accuracy and endurance.
- Vastly simplified automation solution, thus saving on engineering, investment and maintenance costs and making the use of man and robot cost-effective.
Features of assistive robots
To be able to interact safely and effectively with man in the working environment, assistive robots have to meet a whole series of requirements:
- Safety: man’s safety at all times is imperative when handling an assistive robot. A safety concept has to be drawn up and approved by the relevant authorities. The concept not only has to comply with standards and guidelines but also be adapted to the respective application.
- Easy operation: the user has to be capable of adapting the assistive robot to changing requirements, e.g. modified component geometries. In order to do this, the operator needs a simple user interface that enables him to combine pre-defined functions with program sequences and parameterize them in an intuitive way.
Robust process execution: it has to be possible to implement assistive robots in assembly environments which were previously manual. To enable this, the robots have to cope with changing component positions and tolerances. Therefore, Fraunhofer IPA has developed a sensor-controlled assembly system based on the principle of “rough localization – fine localization – force control assembly”. A 3D camera located above the workstation detects the approximate position of a device/component with an accuracy of +/- 1 cm. The robot then approaches this position and pinpoints it using a stereo camera integrated into the robot tool with a better level of accuracy than 1 mm. The actual assembly process is then executed by force control in order to detect component tolerances or canted components and react accordingly, e.g. by initiating a second attempt or informing the operator.
Safe human robot collaboration in the assembly