#5 CARA – four steps to safe cobot deployment
Risk assessments for applications in which the robot is not fully enclosed are still a time-consuming job and not very intuitive, thus posing a hurdle for many companies. The CARA software - Computer-Aided Risk Assessment - provides companies with targeted support and makes risk assessment easier and faster.
Risk assessments for cobots are usually much more complex than for industrial robots that are completely surrounded by a fence. Since interaction between humans and robots is desired in a collaborative scenario, significantly more potential hazards for humans are involved, and both robot and human movements must be taken into consideration. In the risk assessment, therefore, many more potential hazards must be listed, assessed according to their risk and, if possible, minimized.
This is where CARA comes into play. The basis and prerequisite for CARA is a 3D layout of the robot cell and the work process. These can be taken from Visual Components, for example, for which the safety experts at Fraunhofer IPA have created a plug-in. CARA then helps companies in four steps.
Step 1: Identify potential hazards
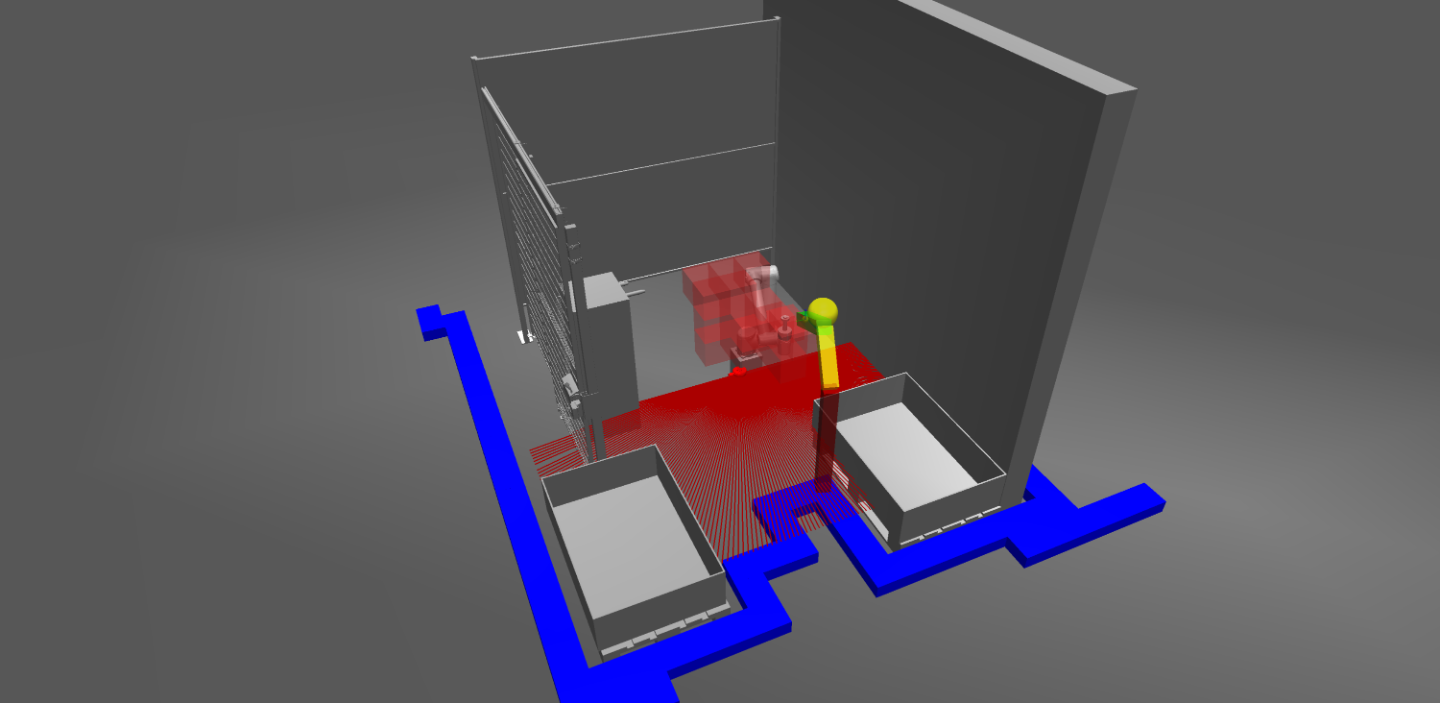
CARA identifies potential mechanical hazards such as pinching, crushing or collisions by analyzing how far humans can reach into the robot cell and where robots and humans might touch each other. The program automatically checks all areas that humans can reach for these potential hazards.
Step 2: Assess risks due to collision forces
In case of a potential contact between human and robot, CARA gives an estimation for how frequent, probable and severe a theoretically possible injury would be. This helps companies determine how urgently they need to provide a particular safeguard. The limits in ISO TS 15066, which specifies permissible collision forces, are taken into account.
Step 3: Provide protective measures
Where contact between humans and robots is inadmissible, CARA makes it easier to integrate suitable safety measures such as fences, laser scanners, radar sensors or light curtains. Safety distances are recommended based on the standard ISO 13855. The software also visualizes which areas are protected by the safeguard so that its effectiveness can be easily verified.
Step 4: Check risk reduction
Finally, users can run through the simulation of the revised application again and check how safe the system now is as a result of the proposed measures and that all risks have been eliminated as far as possible. If necessary, an iterative approach can be taken. The software also allows different safety concepts to be compared. For this, aspects such as the accessibility of the cell or the cost-effectiveness of the solution can be considered. The achievable cycle times of robot applications can also be calculated and compared with other concepts.
CARA documents the identified risks and mitigation measures. Furthermore, the safer cell layout edited in CARA can also be fed back into Visual Components. This results in a faster, clearer, more intuitive and less error-prone risk assessment. Customers confirm a 54 percent time savings for researchers to assess a cobot cell.
CARA at the heart of safety services
CARA is not the only service offered by Fraunhofer IPA for safe robot applications. The safety team has also developed a test bench that can be used to determine the collision forces of different robots under varying conditions, for example with different speeds, robot poses or geometries of the colliding parts.
This data, in turn, is then fed into CARA. The test facility is also available to companies as part of projects. They can have a frequently-used robot measured once, in order to estimate achievable KPIs for that particular robot already when they start planning a project.
In addition, there is the Robo Dashcam development, which is also linked to CARA. Here, a camera records safety-relevant data and persons in compliance with data protection regulations when the robot cell is already in operation. This can also be done over longer periods of time, e.g. several weeks, so that statistically robust data is obtained. Based on this data, which can be imported into CARA, the potential for optimizing the safety concept can be determined in order to increase the performance or cycle time of the application. This allows productivity to be improved by up to ten percent, for example. Other helpful tools are planned to dock onto CARA in the future.
Multi-faceted service
The above-mentioned developments incorporate the experience gained from more than 15 years of work in the field of functional safety. Furthermore, several members of staff are actively involved in international ISO standardization committees, thus ensuring that the latest knowledge from developments relating to safety standards is always incorporated into applications when they are implemented. CARA can also be used by the staff at Fraunhofer IPA for consulting activities, enabling them to offer simplified and systematic advice to companies. In addition, CARA is available as a license should system integrators or robot users, for example, want to use it for themselves. Safety first - now so much easier!
 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA