 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA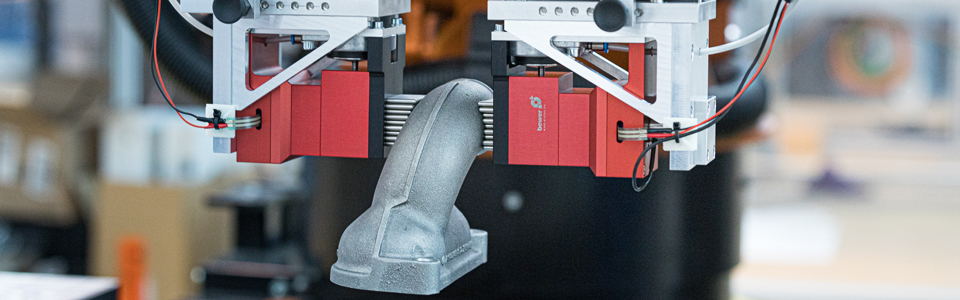
Automatisiertes Abformen und Greifen von komplex geformten Oberflächen
Eine hohe Produkt- und Bauteilvarianz erfordert eine flexible Handhabungstechnik, um Umrüstaufwände von starren Formgreifern zu vermeiden. Wissenschaftler des Fraunhofer IPA haben auf Basis eines bestehenden Flexform-Spannmoduls der Firma Christian Bewer Gmbh eine vollautomatisierte und kraftüberwachte Greifkinematik entwickelt. Das System registriert die Abformung eines beliebigen Bauteils und arretiert das Stößelfeld. Anschließend kann eine definierbare Spannkraft für ein sicheres Bauteilhandling aufgebracht werden. Über Schnittstellen kommuniziert die Steuerung des Greifers mit der übergeordneten Robotersteuerung zur Freigabe von Bewegungsvorgängen.

