 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA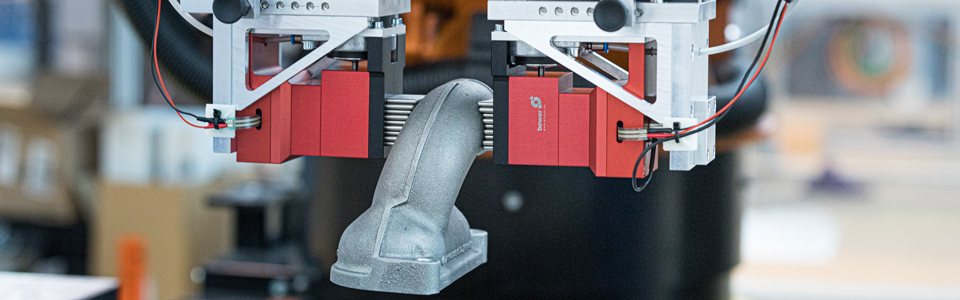
Automated clamping technology for robot handling in an i4.0 environment
High product and component diversity calls for a versatile handling technology that eliminates the need to change over rigid griping systems. Scientists at Fraunhofer IPA have developed a fully automated and force-monitored gripping kinematics system based on an existing Flexform clamping module from Christian Bewer GmbH. The system registers the shape of any given workpiece and locks the ram pad in place. A definable clamping force can then be applied that ensures safe component handling. The gripper's controller communicates with the higher-level robot control system via interfaces to enable movement sequences.

