 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA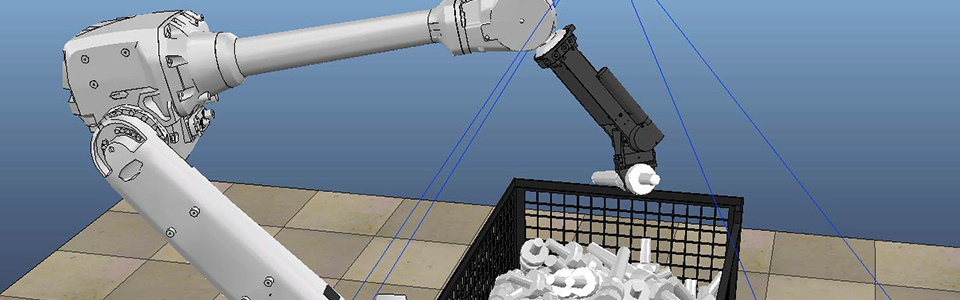
In einer virtuellen Lernumgebung sollen Roboter künftig den Griff-in-die-Kiste üben.
Wenn maschinelle Lernverfahren in der Industrie Anwendung finden sollen, müssen Roboter schneller als bisher lernen, Bauteile sicher zu greifen. Im Forschungsprojekt Deep Grasping entwickelten Wissenschaftler vom Fraunhofer IPA und der Universität Stuttgart deshalb eine virtuelle Lernumgebung. Darin werden neuronale Netze geschult, die anschließend auf reale Roboter übertragen werden.
Lernen Roboter das Greifen von Objekten aus Erfahrung, ist die Lernzeit noch zu lang, um künstliche Intelligenz für Handhabungsaufgaben wirtschaftlich in der Industrie einzusetzen. Mithilfe der entwickelten virtuellen Lernumgebung schulen Roboter nun bereits vor der Inbetriebnahme ihre neuronalen Netze: Der Griff-in-die-Kiste wird nur noch simuliert. Die vortrainierten Netze werden anschließend auf den realen Roboter übertragen – das spart Zeit.
Für das Projekt wurde ein Datensatz für neuronale Netze erstellt, der typische Griff-in-die-Kiste-Szenarien zeigt und dank seiner Größe in der Lage ist, auch tiefe neuronale Netze trainieren zu können. In diesem Rahmen wurden neuronale Lernmethoden zur Objekterkennung mit 2D- und 3D-Daten zur Trennung von zum Beispiel Werkstücken durch Roboter entwickelt und auf Testplattformen verifiziert. Die Bildverarbeitungsalgorithmen lernen dabei selbst neue Werkstücke ein, um den Bedarf an Experten bei der Inbetriebnahme oder beim Werkstückwechsel zu reduzieren. Im Rahmen des Forschungsprojektes wurde ein Ansatz zur 6D-Objektlagenschätzung entwickelt, welcher in wenigen Millisekunden robuste und akkurate Lageschätzungen auf simulierten und realen Daten liefert.

Dem Projekt lagen zwei Anwendungsfälle zugrunde: Die Vereinzelung von chaotisch gelagerten, starren Werkstücken, wie sie häufig in der Industrie bei der Bestückung von Maschinen erfolgt, sowie die Handhabung gestapelter, teils nachgiebiger Objekte, die typischerweise bei der Kommissionierung im Einzelhandel vorzufinden sind.