 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA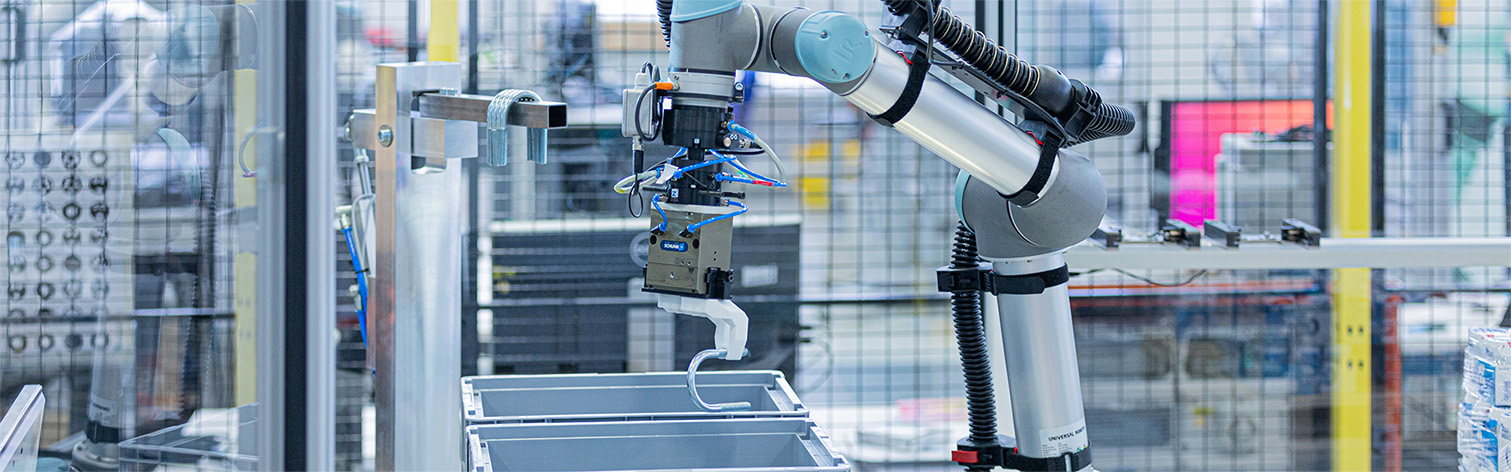
Vereinzeln mit Robotern: Griff-in-die-Kiste
Reiternavigation
Kompetenzen
In nahezu jeder Produktion fällt Schüttgut an. Die einzelnen Werkstücke werden ungeordnet in Kisten transportiert und an verschiedenen Stationen weiterverarbeitet. Dazu müssen sie entnommen und definiert eingelegt werden. Das geschieht heute noch vorwiegend von Hand – eine eintönige, körperlich belastende und kostenintensive Arbeit. Um diese Situation zu verbessern, haben Forscher am Fraunhofer IPA die Bildverarbeitungssoftware bp3TM entwickelt. Sie ermöglicht es einem Roboter, ungeordnete Werkstücke aus einer Kiste zu entnehmen. Die Lokalisierung der Werkstücke erfolgt anhand eigens entwickelter, effizienter Algorithmen auf Basis des zugehörigen CAD-Modells und ist mit nahezu beliebigen Objekten möglich.
bp3TM ist direkt einsetzbar und über eine Lizenz erhältlich. Die Software lässt sich flexibel und herstellerunabhängig mit verschiedenen Robotern und Sensoren verwenden (siehe Tabelle).
Dienstleistungen
Das Fraunhofer IPA bietet Ihnen den Modulbaustein bp3TM an, mit dem Sie einfach und kosteneffizient die Funktion Griff-in-die-Kiste in Ihre Anlagen integrieren können.
Weiterhin unterstützen wir Sie bei der Konzeption und Entwicklung automatisierter Zuführsysteme:
- Analyse des zu greifenden Objektspektrums
- Kurzfristige Voruntersuchung und Machbarkeitsstudien mit Ihren Teilen an unserem Versuchsaufbau mit einem Industrieroboter und verschiedenen Sensoren
- Entwicklung von Lösungskonzepten für Ihre Vereinzelungsaufgaben (Konzeption der Roboterzelle, Ausarbeitung eines Lastenhefts, Auswahl der Sensoren und Auslegung von Greifsystemen)
- Bereitstellung und individuelle Anpassung des Software-Pakets bp3TM für Ihre Aufgabenstellung
- Vermittlung von Realisierungspartnern und Begleitung der Realisierung
- Schulung der Entwickler, Inbetriebnehmer und Bediener
Technologien und Innovationen
Die berechnete Roboterbahn zur Entnahme der Werkstücke wird herstellerunabhängig über TCP/IP an die Robotersteuerung übertragen. Für die Datenaufnahme können verschiedene Sensoren und 3D-Messverfahren eingesetzt werden. Durch den optimalen Sensor für die vorgegebene Anwendung wird eine niedrigere Taktzeit bei gleichzeitig zuverlässigerer Detektion erreicht. Um den Taktzeitanforderungen moderner Fertigungsanlagen noch besser gerecht zu werden, kann auch ein Zwei-Arm-Roboter eingesetzt werden. Für diesen zweiarmigen Demonstrator hat das Fraunhofer IPA im Oktober 2014 den handling award erhalten.
bp3TM erkennt zudem selbstständig die Position des Ladungsträgers, selbst bei manuellem Umsetzen von Kisten oder Gitterboxen. Eine definierte Ablage der Werkstücke ist auch dann möglich, wenn diese chaotisch in der Kiste liegen: Die Software berechnet die Roboterbahn für die Ablage entsprechend dem verwendeten Greifpunkt und der Orientierung, sodass die Bauteile immer lagerichtig abgelegt werden.
Um die Leistung des Griff-in-die-Kiste weiter zu steigern und die Inbetriebnahmezeiten zu verkürzen, soll die Software bp3TM künftig durch maschinelles Lernen bereichert werden. Dazu erarbeitet das Fraunhofer IPA zusammen mit der Universität Stuttgart derzeit eine virtuelle Lernumgebung. In ihr soll die Software bereits vor der Inbetriebnahme ihre Neuronalen Netze schulen, um bestmöglich auf den realen Anwendungsfall vorbereitet zu sein. bp3TM ist als Einzelplatz oder – wenn mehrere Handhabungsroboter zum Einsatz kommen sollen – als Cloud-Lösung verfügbar.
Nutzen
Mit der am Fraunhofer IPA entwickelten, industrieerprobten Software bp3TM lässt sich eine automatisierte Werkstückvereinzelung und -zuführung wirtschaftlich und einfach realisieren. Sie ist mittlerweile in über zehn Anlagen im Dreischichtbetrieb im Einsatz und erreicht beste Verfügbarkeit. Anlagen und Produkte werden kompakter, flexibler und leistungsfähiger.
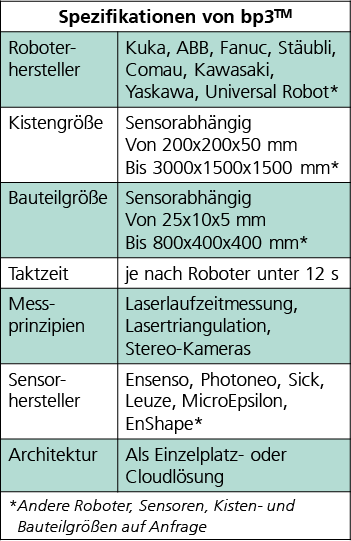
Spezifikationen von bp3™

Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyAI Picking
Bin picking 3d / Griff-in-die-Kiste mit Zweiarm-Roboter

Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyROBOTT-NET SoSta – Easy to use multi-purpose SOrting and STAcking robot for sheet metal part