 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA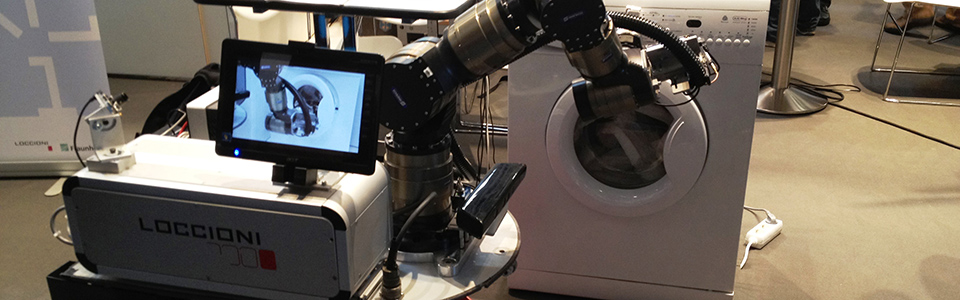
ECHORD-InterAID: Interactive Mobile Manipulators for Advanced Industrial Diagnostics
In Kürze
Das Experiment InterAID als Teil des EU-Projekts ECHORD demonstrierte, wie mobile Roboter für komplexere Aufgaben in der Diagnose und Qualitätskontrolle in industriellen Umgebungen eingesetzt werden können.
Im Detail
Die Technologien wurden anhand des Anwendungsszenarios »Testen von Waschmaschinen« entwickelt und umgesetzt. Dabei fuhr der Roboter die einzelnen Maschinen autonom an und ermöglichte per Knopfdruck bspw. das Anschalten oder den Programmwechsel. Anschließend zeichnete er mit seiner Sensorik objektive Qualitätsmerkmale auf. Möglich machten dies sowohl die Hardware (Arm mit sieben Freiheitsgraden, Dreifinger-Greifer, Kameras, 3D-Sensoren, Mikrofon, Laservibrometer) als auch intelligente Algorithmen u. a. zur 3D-Umgebungserfassung und kollisionsfreien Armplanung.
InterAID ist ein Teilprojekt der EU-geförderten Initiative ECHORD zur Stärkung der Kooperation von Robotikforschung und -praxis.