 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA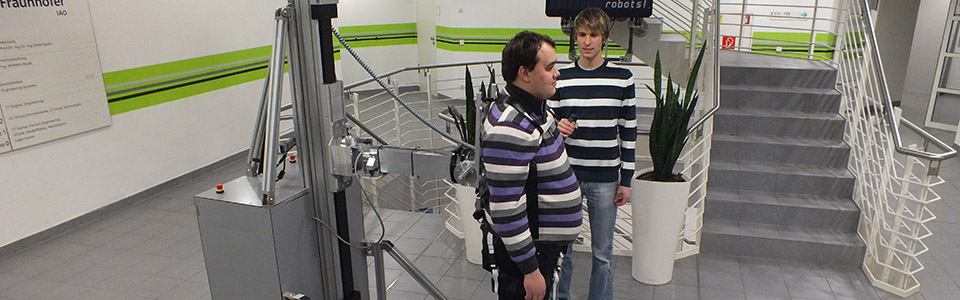
Mobiler Therapieroboter
In Kürze
Der im Projekt entwickelte Prototyp für einen mobilen Therapieroboter sollte Patienten dabei unterstützen,
z. B. in der Rehabilitation nach Schlaganfällen wieder laufen zu lernen und dabei ein richtiges Maß an Unterstützung aber auch Bewegungsfreiheit bieten.
Im Detail
Grundlage für das Projekt bildete eine Analyse der medizinischen und technischen Anforderungen an einen Therapieroboter. Dabei ermittelten die Wissenschaftler die benötigte Anzahl von Freiheitsgraden des Roboters, um eine möglichst natürliche Laufbewegung zu ermöglichen. Im Anschluss evaluierte das Fraunhofer IPA mehrere kinematische Konzepte und baute einen Prototyp bestehend aus einer omnidirektionalen Plattform und einem Haltesystem mit acht Freiheitsgraden auf. Die Inbetriebnahme des Prototyps umfasste die Implementierung einer Kraftregelung, durch die das Robotersystem dem Patienten folgen kann. Diese wurde in ersten Tests erprobt.
Dieses Projekt wurde durch das Zentrum für Integrative Neurowissenschaften (CIN) der Universität Tübingen gefördert.