 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA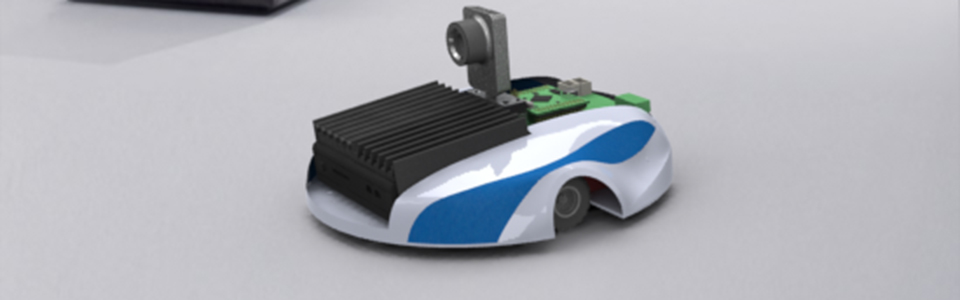
Vislok: Visuelle Lokalisierung von Kleinrobotern
In Kürze
Ziel dieses Forschungsprojektes war es, ein Verfahren zur visuellen Lokalisierung von Robotern basierend auf Low-Cost-Farbkameras zu entwickeln.
Im Detail
Haushaltsroboter navigieren oft per Zufallsprinzip, allerdings ist eine systematische Navigation effizienter, weil sie Dopplungen vermeidet. Um diese Navigation kostengünstig zu realisieren, hat das Fraunhofer IPA einen Prototyp mit Differentialantrieb entwickelt, der eine Webcam zur Kartenerstellung und Lokalisierung nutzt. Zur Lokalisierung des Roboters wurde ein Verfahren entwickelt, das die Eigenbewegung des Roboters und gemessene Kameradaten kombiniert. Das Verfahren misst und erkennt dabei über die Farbkamera kontinuierlich markante Punkte in der Umgebung und berechnet deren dreidimensionale Koordinaten. Durch den Abgleich der erstellten Karte mit neuen gemessenen Kameradaten ist es möglich, die absolute Roboterposition in der Umgebung zu jedem Zeitpunkt zu bestimmen.