 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Deep Picking – KI-basierte Kommissionierung von Objekten
In Kürze
Im Projekt »Deep Picking« entstehen modulare und flexible Software- und Hardwarelösungen für die Kommissionierung und Depalettierung bekannter und unbekannter Objekte in unterschiedlichen Anlieferungszuständen in Produktionsprozessen. Die Lösungen lassen sich schnell und robust integrieren und einlernen.
Im Detail
Ziel des Projekts »Deep Picking« ist es, neue Technologien hervorzubringen, die den Automatisierungsgrad in der Handhabung erhöhen und so wirtschaftliche und qualitative Potenziale nutzbar machen. Dazu entwickeln die IPA-Experten Handhabungstechnologien, um Depalettier- sowie Kommissionieraufgaben so robust und flexibel wie möglich zu gestalten.
Bisher ist die Handhabung von Werkstücken und Produkten eine gleichermaßen wichtige, aber auch schwierige Aufgabe in der Intralogistik und Produktion. Die größte Herausforderung stellt hier die enorme Produkt- und Variantenvielfalt der Werkstücke dar. Sie erschwert das individuelle Einrichten des Systems auf die Produkte, das für einen robusten Prozess notwendig ist. Außerdem ist die Handhabung in automatisierten Prozessen zumeist werkstückspezifisch ausgelegt. Klassische Handhabungsaufgaben stoßen deshalb vor allem beim Handling unbekannter Objekte an ihre Grenzen.
Durch den Einsatz von Maschinellem Lernen entstehen mit der IPA-Lösung neue Technologien, die auch die Handhabung unbekannter Objekte möglich machen. Diese Technologien sind insbesondere für den Einsatz in intralogistischen Depalettierprozessen und für Kitting-Anwendungen in Produktionsanlagen nötig, um das Automatisierungspotenzial zu erhöhen.
- Depalettierprozesse: Algorithmen, die Objektlagen schätzen können, erkennen mithilfe der IPA-Technologien auf Paletten angelieferte Produktgebinde, die dann durch Aufwälzgreifsysteme gehandhabt werden. In diesem Kontext wird auch das Aufwälzgreifsystem der Firma Premium Robotics GmbH weiterentwickelt.
- Kitting-Anwendungen: Die IPA-Experten entwickeln hierzu die bestehende Griff-in-die-Kiste-Software bp3TM weiter, um den Prozess robuster und schneller zu gestalten und das modellfreie Greifen unbekannter Objekte zu verwirklichen. Maschinelles Lernen ermöglicht so das robuste Greifen auch unbekannter, flacher, verhakter und komplexer Objekte.
Die entwickelten Technologien ergänzen das umfangreiche Angebot an Greifplanungssoftware des Fraunhofer IPA. Wenn auch Ihr Anwendungsfall individuelle Greiflösungen erfordert, kontaktieren Sie uns gerne.
Einblicke ins Projekt
Projektvideos

Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacy
Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacy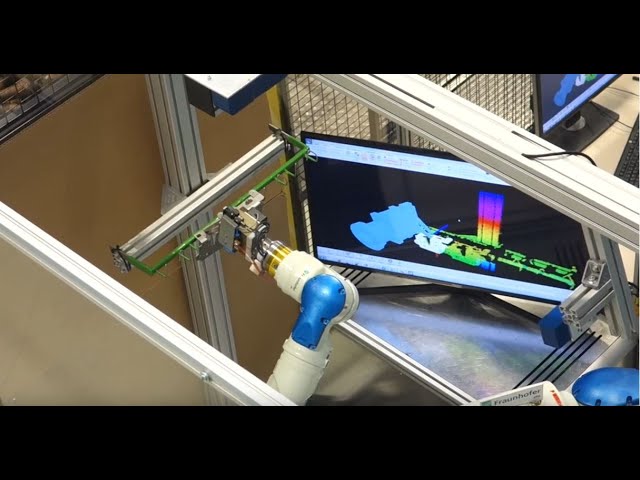
Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacy
Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacy
Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyBilder

Visualisierung von Sensordaten und lokalisierten Werkstücken.
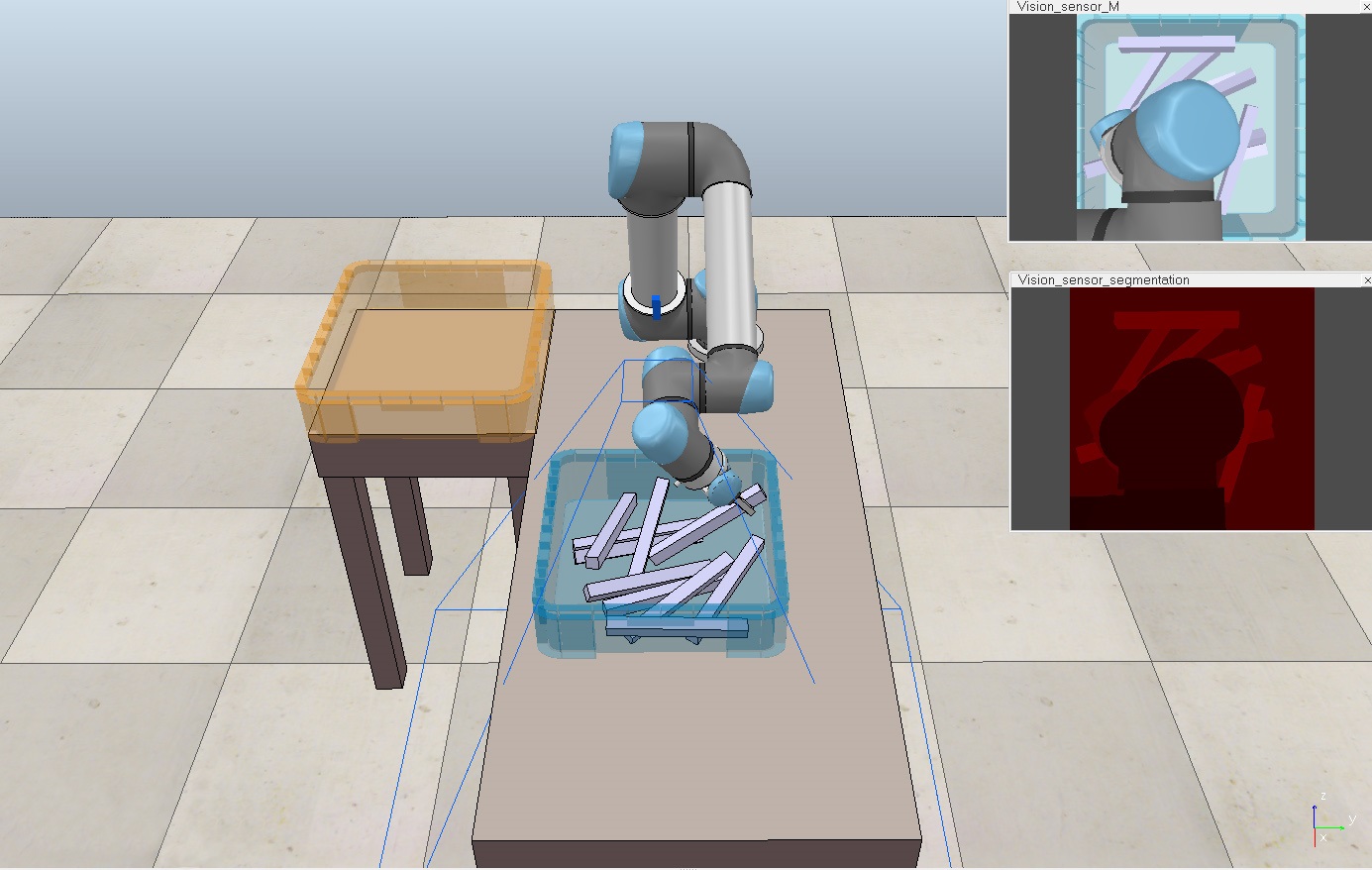
Modellfreies Greifen in 6D
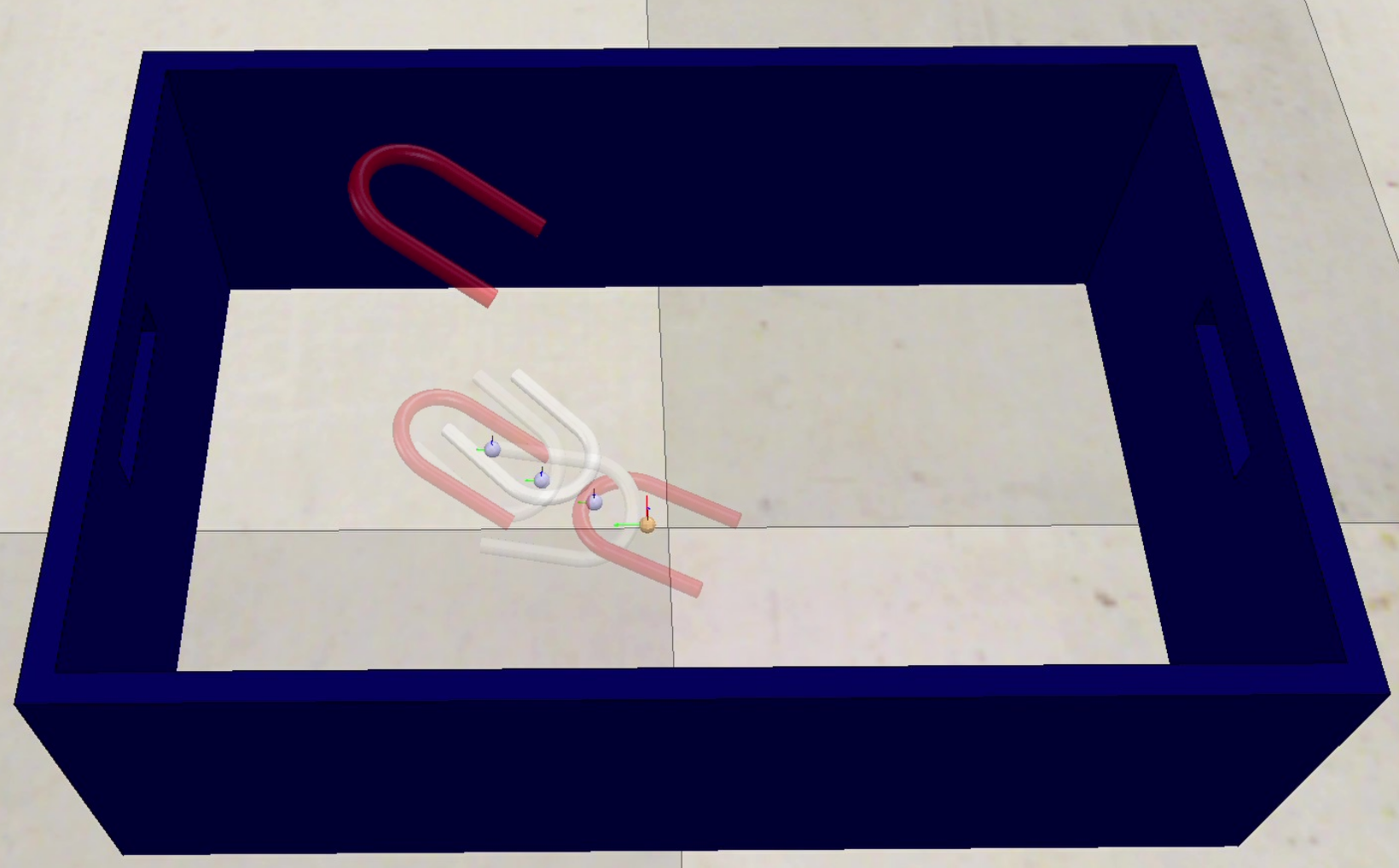
Simulation einer Enthakung in der Kiste.