Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPAFraunhofer IPA uses various methods to measure robot systems and improve their accuracy.
Measuring industrial robots to increase accuracy
Tabbed contents
Reference project
In short
Measuring a robot system helps make it more efficient and makes it possible to predict the quality of task execution. Prior knowledge of what will happen if the application changes enables industrial robots to be used more flexibly. Furthermore, the measurement results allow comparisons between planned and executed paths, which is why a quality prediction can already be made at this stage.
In detail
The aim of the project is to measure an articulated arm robot and thus increase its accuracy in accordance with ISO 9283 (“Manipulating industrial robots - Performance criteria and related test methods”). To do this, the IPA experts randomly select a part of the robot's workspace and test it. The procedure according to the standard enables them to generate repeatable and robust results. From this, they can derive targeted measures to increase robot accuracy and make predictions about how the robot will behave in the application.
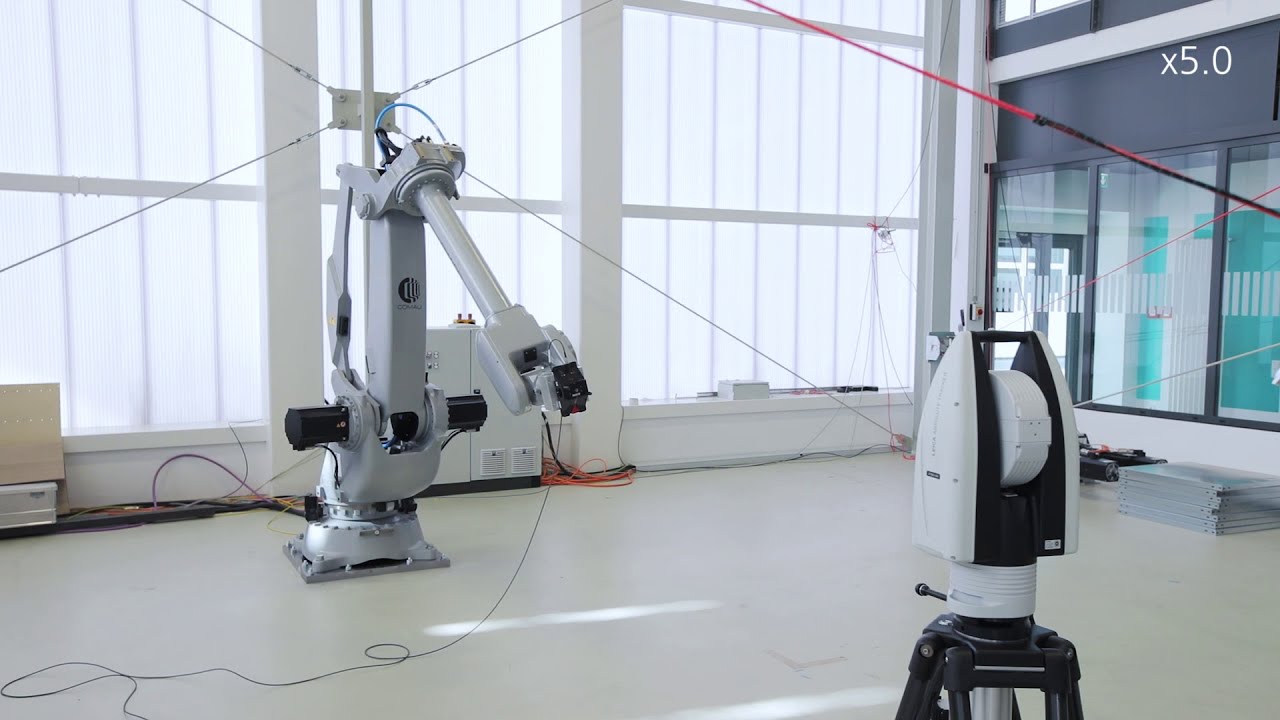
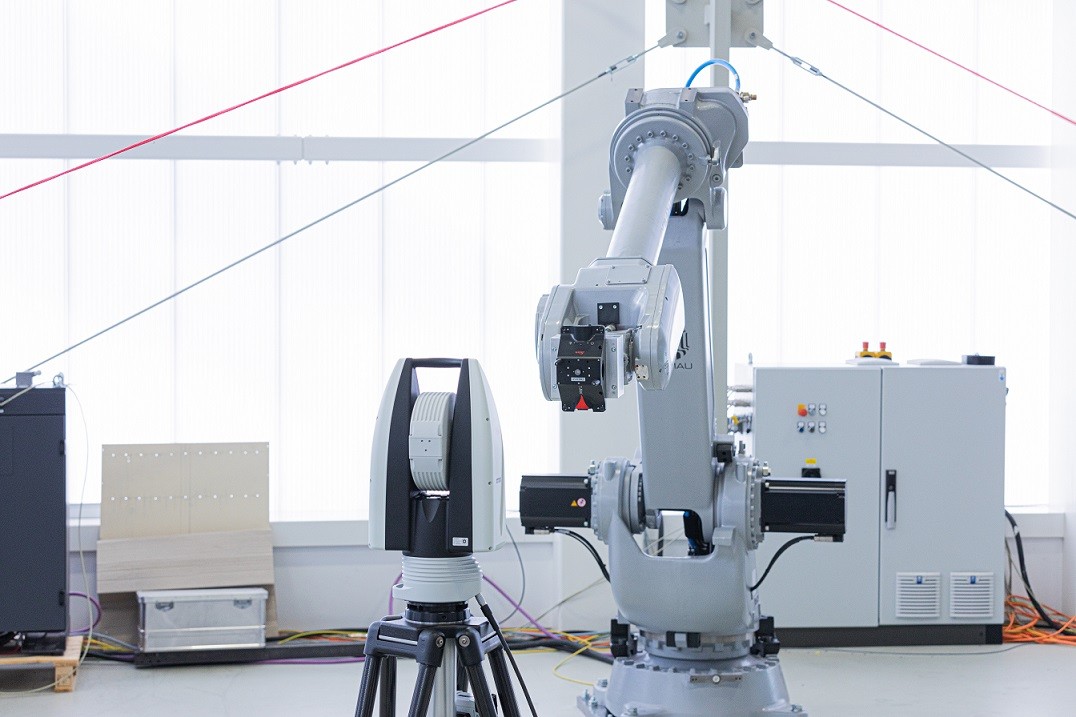
To acquire the system's external data, the institute uses a Leica Absolute Tracker AT960 combined with a Leica T-Mac. The measurements made by these devices have an accuracy of +/- 40 µm anywhere in the workspace. The tests enable companies to deploy robots in a targeted manner and analyze the quality of the system. If the application changes, for example due to a different workload or a different workspace, the company knows the effects in advance and can therefore use the system more flexibly. In addition, there is the possibility to compare robots of similar types under different aspects so that they can be used in a more targeted manner. Finally, the most important advantage of an accurate robot is that the planned path and pose can be implemented easily without deviations, and thus without the need to interact manually with the real robot.
Important to know: each application places different process requirements on the robot system. Welding processes primarily require high speed and path accuracy in order to improve overall process quality. In pick-and-place tasks, on the other hand, the focus is on absolute accuracy and path speed in order to minimize cycle times and achieve as few false picks as possible. Depending on the application and accuracy requirements, the IPA experts can perform adapted tests for this. In the research projects, they do not change the mechanics of the robot, but rather increase the performance of the robot system by adjusting process parameters such as speed and load.

Measuring a robot arm with a Leica Absolute Tracker AT960 combined with a Leica T-Mac.

The measurements made by these devices have an accuracy of +- 40 µm anywhere in the working space.
With an accurate robot, the planned path can be executed without manual interaction on the real robot.
Video