 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPARunde Sache: Robotersystem für eine hochgenaue Kantenverrundung an Turbinenwellen
Scharfe Kanten und Grate an sicherheitskrititischen Bauteilen führen zu einem erhöhten Nacharbeitsaufwand in der Produktion. Das Fraunhofer IPA hat ein Robotersystem entwickelt mit dem Kanten automatisiert und hochgenau ver-rundet werden können. Durch den beweglichen Roboter können dabei zum einen schwer zugängliche Stellen erreicht werden. Zum anderen wird eine hohe und vor allem wiederholbare Qualität des Verrundungsprozesses sichergestellt. Durch intelligente Sensorik kann der Roboter die Kanten am Bauteil zudem selbstständig erkennen und sich selbst programmieren.
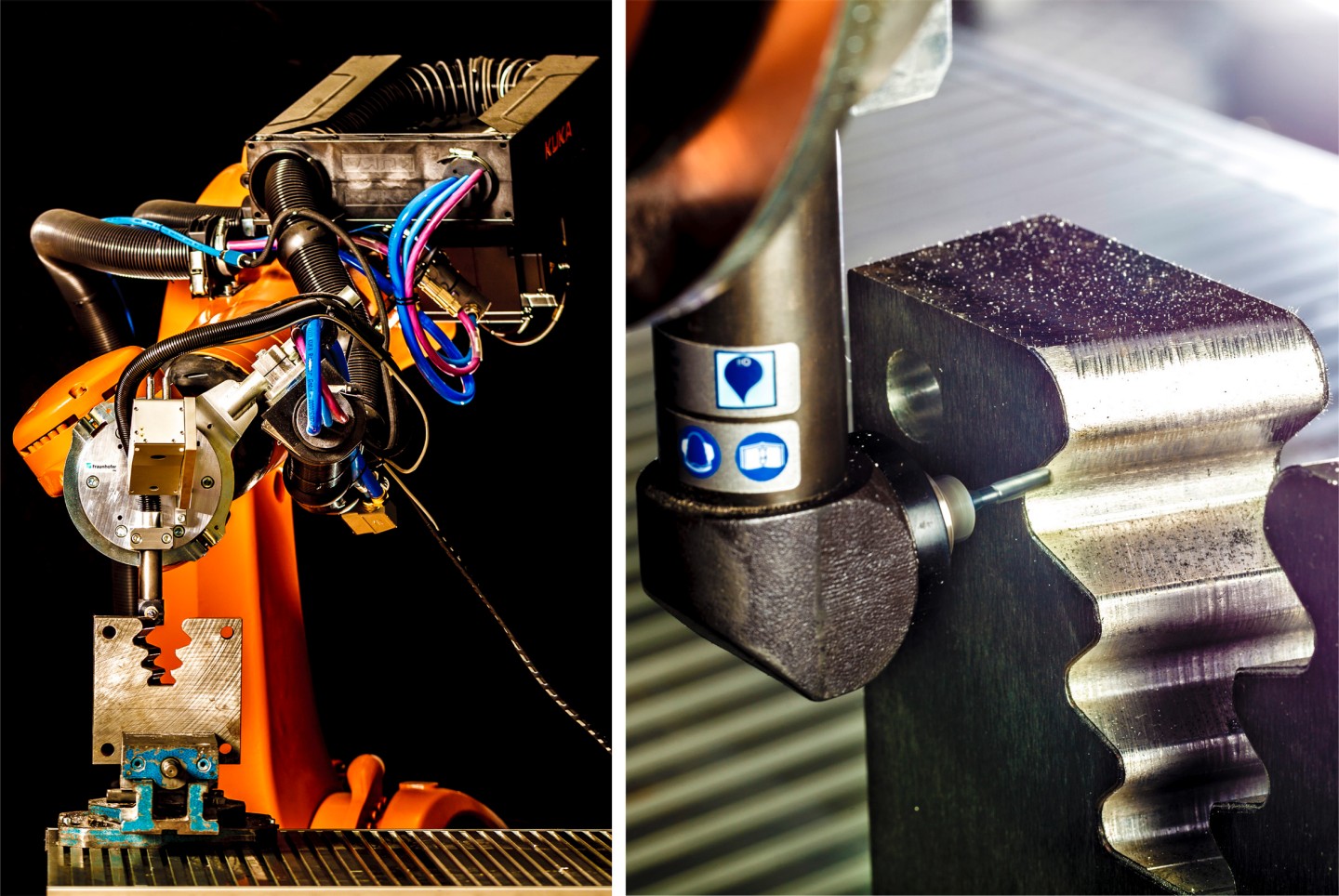
Flexibilität, höchste Qualität und Reduktion von Nacharbeitsprozessen sind Themen denen sich produzierende Unternehmen stellen müssen. Für die Nacharbeit an Bauteilkanten kommen bisher oft nur große Spezialanlagen oder zeitaufwendige manuelle Prozesse in Frage. Zusammen mit dem Bereich Steam Turbines der Siemens AG am Standort Mülheim an der Ruhr hat das Fraunhofer IPA nun ein Robotersystem entwickelt, um flexibel und automatisiert Kanten an Turbinenwellen zu verrunden. Durch die Verbindung von Sensorik und intelligenter Software wird die Lage der Bauteilkanten exakt
erkannt und automatisiert ein entsprechendes Roboterprogramm erzeugt. Hierbei werden Genauigkeiten von 0,1 mm erreicht. »Robotersysteme, die hohe Genauigkeiten erreichen, indem sie durch Sensoren auf veränderliche Umgebungsbedingungen reagieren und automatisch aus CAD-Daten programmierbar sind, ermöglichen die wirtschaftliche Auto-matisierung auch bei kleinen Losgrößen und großen Bauteiltoleranzen«, sagt Alexander Kuss, einer der Entwickler des Robotersystems am Fraunhofer IPA.
Roboter passt sich an
Umgebung anDurch den großen Bewegungsraum des Roboters in Verbindung mit schlanken Endeffektor-Werkzeugen werden auch schwer zugängliche Stellen erreicht. Vor allem große Bauteile können oft nicht exakt positioniert werden. Daher passt beim vom Fraunhofer IPA entwickelten Robotersystem eine Software zur Sensordatenauswertung das Bearbeitungs-programm des Roboters immer der aktuellen Bauteillage an. Eine aufwendige Positionierung des Bauteils oder ein manuelles Einmessen entfallen. Hierzu vermisst der Roboter das Bauteil berührungslos und findet die genaue Bauteillage durch einen Abgleich mit dem CAD-Modell des Bauteils. Danach wird ein auf Bauteilposition und Bauteilgeometrie individuell angepasstes Roboterprogramm automatisch aus den CAD-Daten des Bauteils erstellt. Teure und unflexible Vorrichtungen und Gestelle zum Erreichen der notwendigen Genauigkeit werden durch einfache rekonfigurierbare Software ersetzt. Dies ermöglicht auch die einfache Integration des Robotersystems in eine bestehende Produktionslinie oder sogar in vorhandene Fertigungsanlagen. Flexible Automatisierungslösungen für Nacharbeitsaufgaben, die in bestehende Fertigungslinien integriert werden können, werden in Zukunft immer wichtiger.
Durch die automatische Anpassung des Robotersystems an die zu bearbeitenden Bauteile ohne manuelle Programmieraufwände wird die entwickelte Technologie zudem auch für Anwendungsbereiche interessant, in denen eine Roboterlösung bisher nicht wirtschaftlich war. »Wir arbeiten daran, die gezeigte Technologie auf neue Anwendungsbereiche zu übertragen. Vor allem bei bahngeführten Prozessen wie dem Verrunden, Entgraten oder Bahnschweißen kann die hochgenaue Bauteillokalisierung und automatische Programmerzeugung eine wirtschaftliche und zukunftsorientierte Automatisierung ermöglichen«, so Kuss.