 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPABildverarbeitung für jede Wellenlänge und ohne Labor
Im Rahmen der VISION, der Weltleitmesse für Bildverarbeitung, präsentiert sich das Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA dieses Jahr mit zwei Themen: Zum einen zeigen die Stuttgarter Wissenschaftler neue Technologien zur 3D-Umgebungserfassung und zur Objekterkennung im Bereich der Service-Robotik. Zum anderen geht es um die prozessintegrierte Bildverarbeitung für unterschiedliche Wellenlängen.

Dr.-Ing. Marius Pflüger, Gruppenleiter der Abteilung Bild- und Signalverarbeitung am Fraunhofer IPA, weiß: »Bisher wird industrielle Thermographie hauptsächlich mit sehr teuren Hardware-Komponenten und unter Laborbedingungen durchgeführt. Prozessintegration oder Prüfautomaten gibt es kaum. Eine Kopplung mit Standard-Bildverarbeitungssoftware ist nicht möglich, da eine solche kaum verfügbar ist. Daher nutzen wir preiswerte Thermokameras, mit denen wir mehr Prüfmerkmale untersuchen und mehr fehlerhafte Teile erkennen können. In Summe wird die Qualitätssicherung – auch weil kein Labor erforderlich ist – für den Kunden wirtschaftlicher und effizienter«.
Seit mehr als 30 Jahren entwickelt die Abteilung Bild- und Signalverarbeitung am Fraunhofer IPA Lösungen und automatisierte Prüfautomaten für industrielle Aufgabenstellungen. Unter Verwendung modernster Prüfverfahren aus den Bereichen Bildverarbeitung, 3D-Messtechnik und zerstörungsfreie Prüfung wird physikalisches Grundlagenwissen mit methodischer Entwicklungskompetenz kombiniert.
»Neu an der prozessintegrierten Bildverarbeitung, die wir seit diesem Jahr anbieten«, fährt Pflüger fort, »ist die Kopplung der 2D-Bildverarbeitung mit Thermographie in einem Prüfautomaten. Die Integration der Kamera in die IPA-BV-Software »EMSIS« sorgt für eine schnelle und sichere Auswertung. Neue Anwendungsgebiete wie die Prüfung unsichtbarer Produktmarkierungen (z.B. mit unsichtbarem Lack), Funktionstests von Platinen (Detektion von Hotspots), die Prüfung von Rissen unter der Oberfläche und des Bauteilin-neren sowie die Prüfung von Beschichtungen (Vollständigkeit und Haftung) sind damit ab sofort ohne Komplikationen möglich.«
Innovative Bildverarbeitung für Serviceroboter
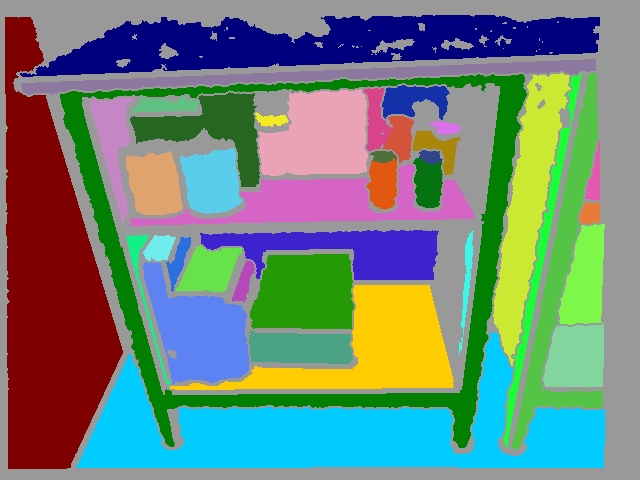
»Lagerroboter sortieren chaotisch angelieferte Teile. Assistenzroboter für den Haushalt unterscheiden zwischen greifbaren Gegenständen und Wohnräumen. Und Reinigungsroboter erkennen und beseitigen Schmutz. Mit den am Fraunhofer IPA entwickelten Systemen für die dreidimensionale Objekterkennung und Umgebungserfassung können Roboter auch komplexe Aufgaben meistern«, weiß Dr.-Ing. Birgit Graf, Gruppenleiterin der Abteilung Roboter- und Assistenzsysteme am Fraunhofer IPA. Wie Robotersysteme auch in dynamischen Umgebungen kollisionsfreie Bewegungen ausführen und Gegenstände zuverlässig erkennen, klassifizieren und greifen, zeigt sie im Rahmen der Messe VISION.
Das dreidimensionale Objekterkennungssystem kann auch noch mehr: Aus der Kombination geometrischer Formen kann es auf die Klasse oder Kategorie des Objekts schließen. »Dank der Kombination aus Objekterkennung und Klassifikation kann der Roboter selbständig spezifische Objekte oder generelle Objektklassen ‚erlernen‘ oder intuitiv auf sie trainiert werden«, erklärt Jan Fischer, wissenschaftlicher Mitarbeiter in der Abteilung Roboter- und Assistenzsysteme. »Auch in veränderlichen Umgebungen kann er Gegenstände zuverlässig wiedererkennen«.
Die lernfähige, dreidimensionale Objekterkennung und Umgebungserfassung sind in verschiedenen Bereichen einsetzbar und wurden durch das Fraunhofer IPA bereits in unterschiedlichsten Anwendungen erfolgreich umgesetzt: Beispielsweise in der industriellen Verwendung für autonome fahrerlose Transportsysteme oder für Handhabungs-, Lager- und Sortieraufgaben, als Schlüsseltechnologie für die Entwicklung fortschrittlicher Assistenzroboter, um hilfsbedürftigen Menschen eine höhere Lebensqualität zu ermöglichen, zur Unterstützung der zunehmenden Automatisierung in der Landwirtschaft, u. a. zur Erkennung von zu pflückendem Obst und Gemüse, sowie für Reinigungsroboter zur automatischen Erkennung von Verschmutzungen.