 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPAMontagevorgänge intelligent und sicher automatisieren
Einmal programmieren, vielfältig einsetzen: Das Fraunhofer IPA zeigt auf der diesjährigen Fachmesse für Produktions- und Montageautomatisierung Motek in Stuttgart vom 5. bis 8. Oktober 2015 ein neues Verfahren für die Industrieroboterprogrammierung. Der Vorteil: Indem der Montageprozess nicht mehr roboter-, sondern aufgabenorientiert programmiert wird, ist er leicht auf neue Aufgaben ähnlicher Art oder gar andere Robotersysteme übertragbar. Außerdem zeigen die Wissenschaftler einen Montagearbeitsplatz für Nietapplikationen, an dem der Werker je nach Aufgabe manuell oder mit Unterstützung eines Robotersystems kollaborierend arbeiten kann und der alle Kriterien für die Zertifizierung nach ISO-Normen erfüllt.
Damit ein Robotersystem eine Montageaufgabe ausführen kann, gibt der Programmierer bisher in einer robotertypischen Programmiersprache die gewünschte Bewegung des Roboters vor. Mit einem Bediengerät positioniert er dazu den Roboter überwiegend manuell, damit das System die für die Montage wichtigen Koordinaten des Werkstücks abspeichern kann. Basierend auf diesen Daten und weiteren Programmschritten führt das System die Montageaufgabe aus.
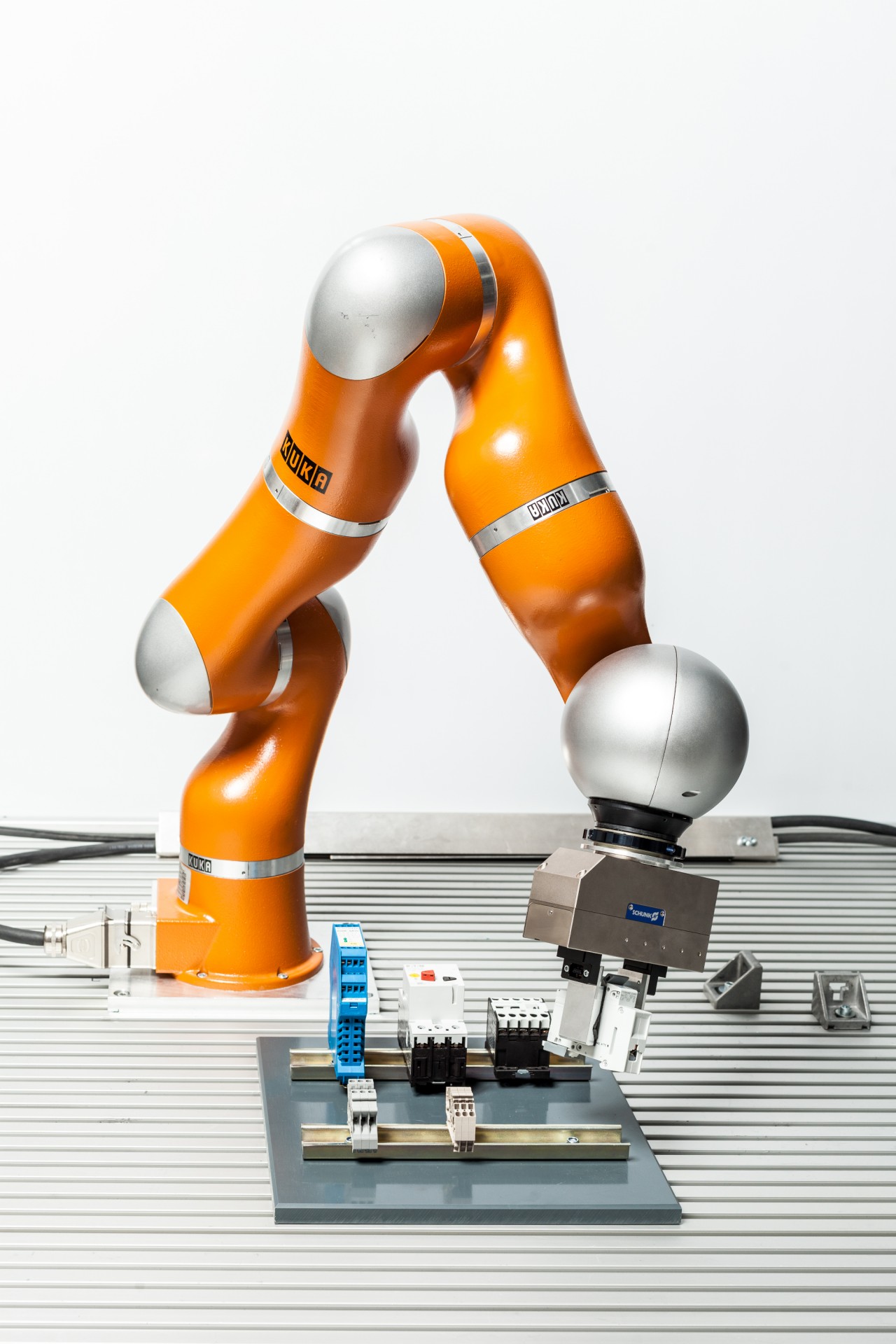
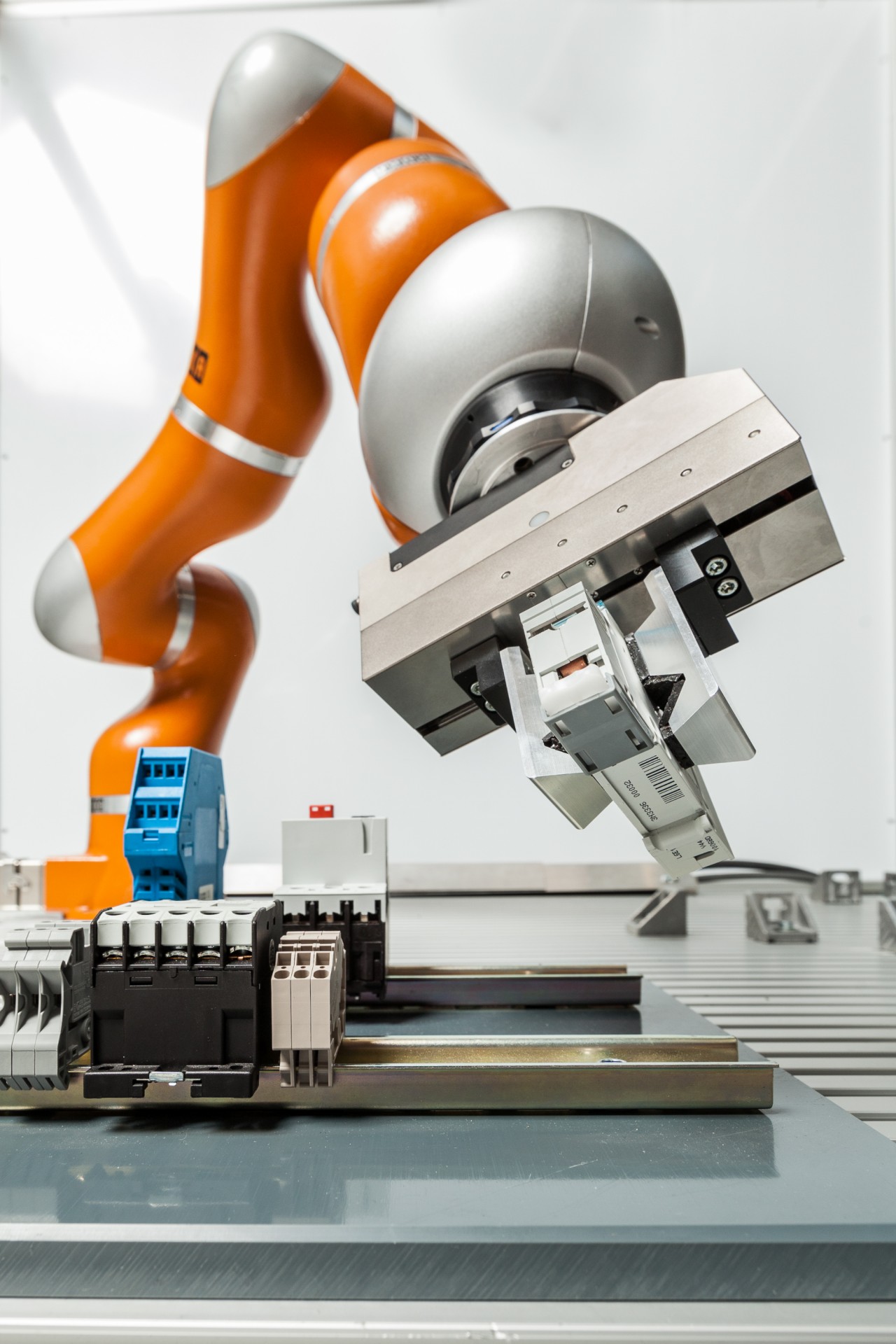
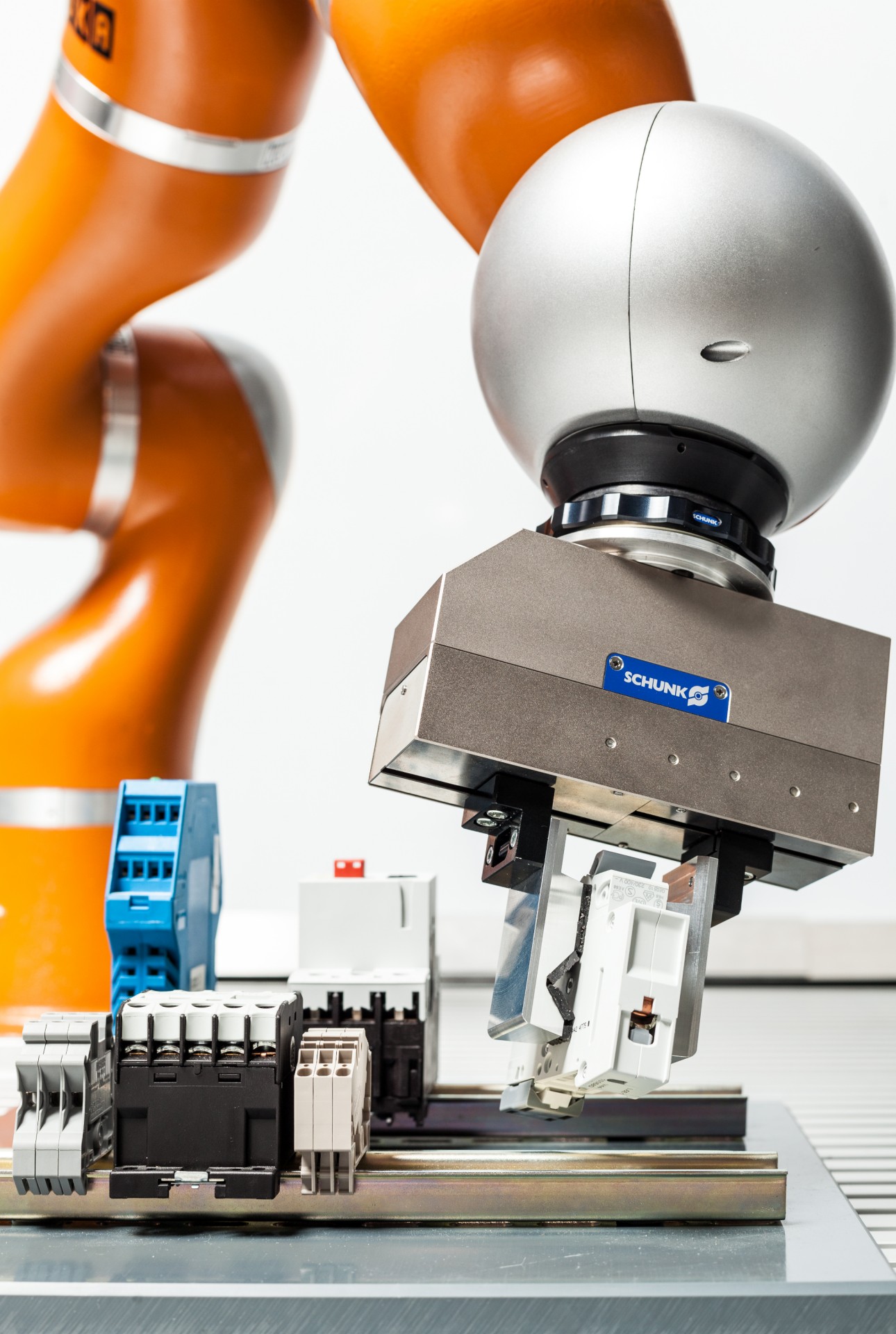
Diese Methode ist aufwendig und wenig flexibel, denn der Roboter fährt eine unveränderliche Bewegungsliste ab, die nur mit genau dem eingelernten Werkstück und dem Prozess funktioniert. Wenn bspw. das Werkstück an einer anderen Position liegt, wenn es Varianten aufweist oder ein anderer Roboter die Montageaufgabe übernehmen soll, muss der Programmierer das System neu einlernen. Bestimmte Montagevorgänge werden deshalb aktuell meist manuell ausgeführt. Ein Beispiel hierfür ist das Montieren von Schaltschränken. Die Schränke selbst und die darin montierten Komponenten wie Klemmen oder Schnittstellenmodule sind in der Ausführung individuell, werkstückseitige Toleranzen können erheblich sein und der Montageprozess erfordert Feinfühligkeit. Eine konventionelle Automatisierung und explizite Roboterprogrammierung wäre deshalb aufwendig und damit in vielen Fällen unwirtschaftlich.
Robotersystem ermittelt Lösungsweg selbst
Am Fraunhofer IPA setzen Wissenschaftler aktuell eine Methode aus der Roboterforschung erstmals für industrierelevante Abläufe ein und demonstrieren sie auf der Motek. Die Methode ermöglicht das Automatisieren anspruchsvoller und vielfältiger Montageaufgaben. Anstatt das Robotersystem wie bisher durch eine direkte Vorgabe von Bewegungen einzulernen, ist es effizienter, den Prozess, Werkstück- und Prozessparameter wie u. a. die Maße des Werkstücks oder die für die Montage nötigen Kräfte des Roboters zunächst in allgemeiner Form zu modellieren. Durch Zuweisung variantenspezifischer Werte und mithilfe aktueller Sensordaten berechnet das Robotersystem selbst, wie es sich bewegen muss. Die einmal modellierte Aufgabe ist dann auch flexibel auf neue Werkstückvarianten oder andere Systeme übertragbar.
Für die im Exponat gezeigte Montage von Schaltschränken muss der Roboter das »Klipsen« und »Einrasten« an den entsprechenden Positionen beherrschen. Mit einer konventionellen Roboterprogrammierung müsste jede Roboterbewegung neu »geteacht«, also eingelernt werden. Mit der Lösung des Fraunhofer IPA hingegen erfolgt die Pfadberechnung basierend auf den Parametern der Schränke und Komponenten automatisch, ähnlich einem einfach verständlichen Arbeitsplan, der erklärt, wie die Montageaufgabe auszuführen ist. Erst dadurch ist die Montage individueller Komponenten überhaupt wirtschaftlich sinnvoll umsetzbar.
Für Endanwender bietet die neue Technik den Vorteil, dass die einzelnen Fähigkeiten oder Abläufe wiederverwendbar sind und dadurch automatisierte Montage insbesondere auch für kleine Losgrößen möglich wird. Systemintegratoren profitieren von schneller und flexibler programmierbaren Robotersystemen und können zusammen mit den Experten des Fraunhofer IPA herausfordernde Montageaufgaben lösen, die bisher nur mit großem wirtschaftlichem Aufwand automatisierbar waren. Außerdem sind einmal entwickelte Fähigkeiten auch herstellerübergreifend mit verschiedenen Systemen ausführbar.
Manuelle und maschinelle Fähigkeiten kombinieren
Das zweite Exponat des Fraunhofer IPA zur Montageautomatisierung zeigt einen Arbeitsplatz, an dem sowohl ein Werker kognitiv bzw. feinmotorisch anspruchsvolle Aufgaben manuell ausführen als auch ein Robotersystem repetitive, nicht ergonomische Aufgaben übernehmen kann. Diese Kombination menschlicher und maschineller Fertigkeiten ist besonders für kleine und mittelständische Unternehmen interessant, denn eine vollautomatisierte Produktionslösung wäre bei den kleineren Losgrößen meist nicht wirtschaftlich sinnvoll.
Die Wissenschaftler haben den Arbeitsplatz so entwickelt, dass an ihm Fügeprozesse wie das Nieten mit einem kollaborierenden System durchführbar sind. Dieses ist voll in einem mobilen Werkzeugwagen integriert und kann je nach Bedarf an der manuellen Arbeitsstation angedockt werden. Auch die Nietpistole kann sowohl manuell als auch automatisiert verwendet werden. Das für die Mensch-Roboter-Kooperation erforderliche, zertifizierbare Sicherheitskonzept haben die Wissenschaftler noch einmal verbessert, indem die früher durch den Roboterarm bewegte Nietpistole jetzt stationär befestigt ist. So ist auch der dazugehörige Schlauch fixierbar und stellt keine Gefährdung dar.