 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPASeilrobotik – Bewegungssimulation in neuen Dimensionen
Das Fraunhofer IPA hat unter der Leitung des Tübinger Max-Planck-Instituts für biologische Kybernetik (MPI) einen neuen Seilroboter mitentwickelt, der erstmals Menschen transportieren kann und neue Maßstäbe für Arbeitsraum, Beschleunigung und Nutzlast bei Bewegungssimulationen setzt. Damit ist den Wissenschaftlern eine entscheidende Weiterentwicklung der Technologie gelungen, die sie bisher für Automatisierungslösungen in der Intralogistik eingesetzt haben.
Seilroboter werden bisher in Produktionsumgebungen genutzt, wo sie hohe Anforderungen erfüllen. Die Systeme übertreffen konventionelle Industrieroboter bezüglich Größe und Traglast um ein bis zwei Größenordnungen. Der Endeffektor kann durch bis zu acht Seile und Winden frei und zugleich sehr präzise bewegt werden. Basierend auf dieser Technologie ist jetzt unter der Leitung von Professor Heinrich Bülthoff vom MPI für biologische Kybernetik weltweit erstmals die Idee eines seilgetriebenen Bewegungssimulators realisiert worden.
Technische Neuerungen
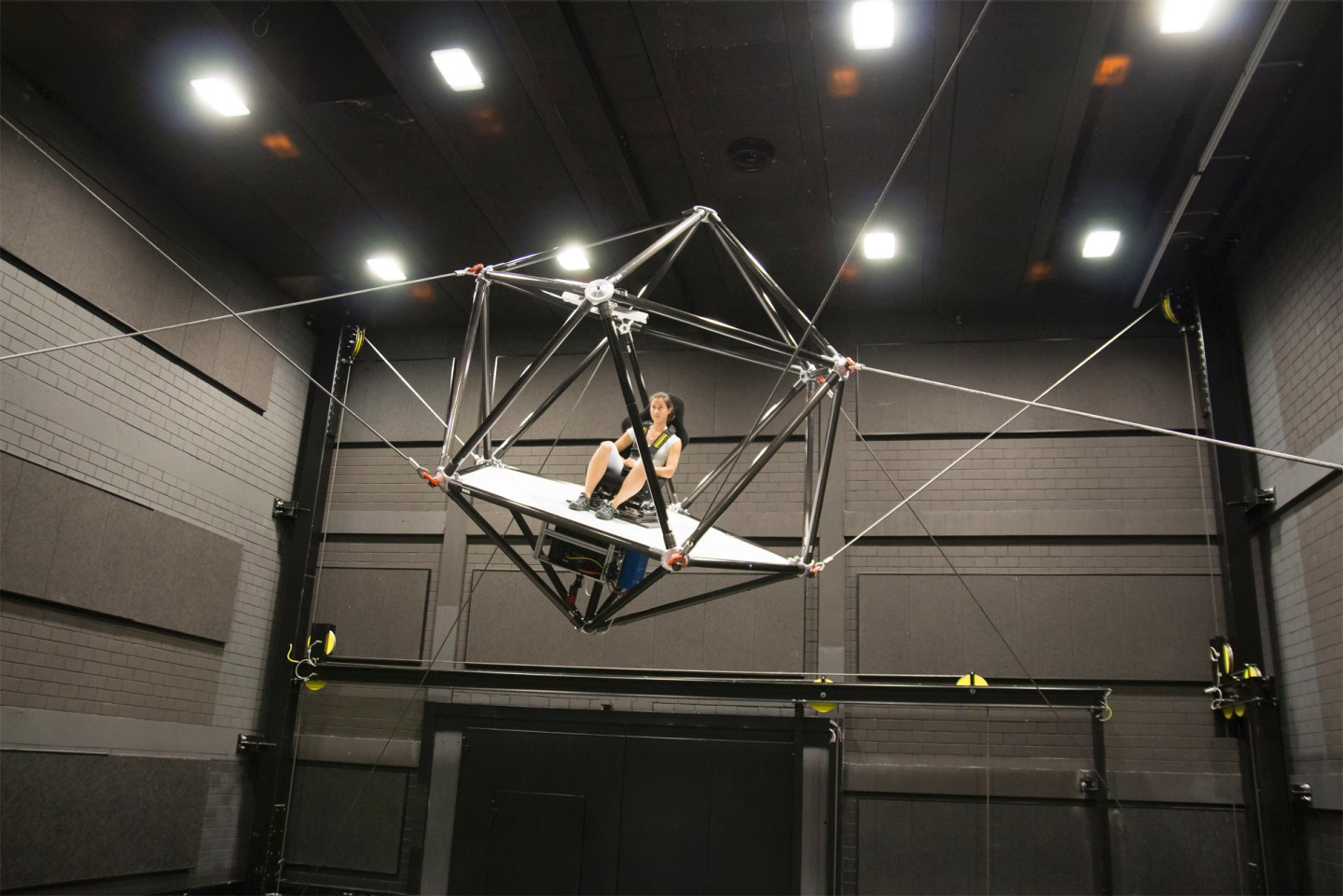
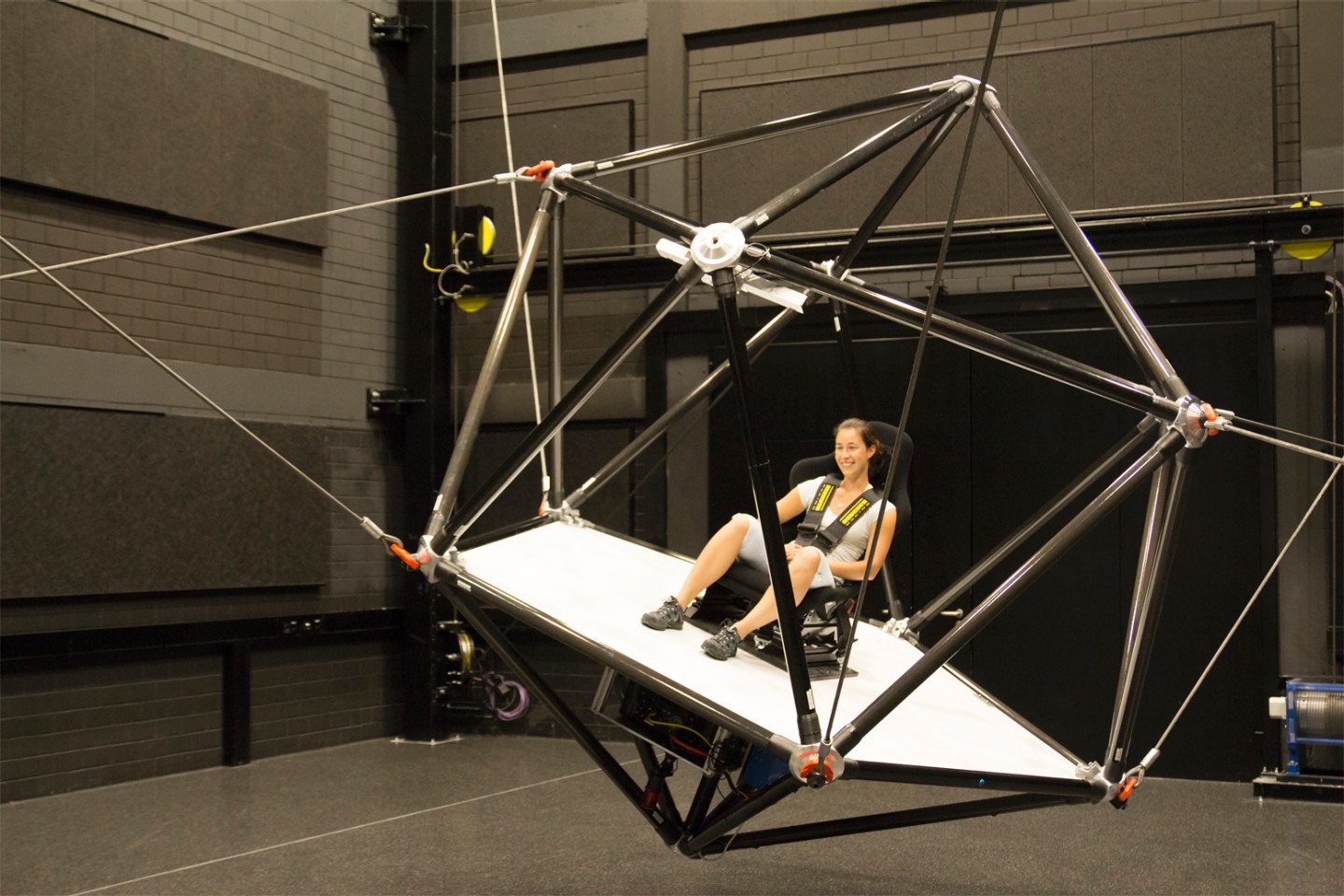
Bei dem Seilsimulator steuern acht im Raum verspannte und an Seilwinden befestigte
Stahlseile die Bewegung der Simulatorkabine. Im Gegensatz zu herkömmlichen Bewegungssimulatoren ermöglicht die Verwendung von Seilen, die bewegte Masse zu reduzieren und die Arbeitsräume beliebig zu skalieren. Die Antriebsleistung von insgesamt 348 kW erlaubt es, die Kabine mit der 1,5-fachen Erdbeschleunigung entlang frei programmierbarer Bahnen in einem hallengroßen Arbeitsraum von 5 x 8 x 5 m³ zu beschleunigen. Zudem ist der Simulator durch das Umhängen der Seile innerhalb einer Stunde an verschiedene Kabinen anpassbar und lässt sich somit für unterschiedliche Szenarien einsetzen.
Philipp Miermeister, der am Fraunhofer IPA der Arbeitsgruppe für Seilrobotik von Juniorprofessor Andreas Pott angehört, hat in der zweijährigen Zusammenarbeit beider Institute die Konzeption und Umsetzung des Simulators mit viel Know-how vorangetrieben. Die Wissenschaftler haben sowohl die Steuerungsalgorithmen implementiert als auch eine leichte und zugleich widerstandsfähige Kabine aus Kohlefaser entwickelt, die den hohen dynamischen Belastungen im Betrieb standhält. Der vollständig aus Karbonfaserrohren hergestellte Kabinenrahmen maximiert das nutzbare Kabinenvolumen mit einem Durchmesser von 260 cm für Projektionsflächen und Cockpitinstrumentierung. So lässt er sich für hochwertige Videoprojektionen und realistische Bedienerschnittstellen nutzen. Gleichzeitig ist der Rahmen mit leichten 80 kg sehr schnell zu beschleunigen und hält große Kräfte aus, denn im Betrieb ziehen die Seile mit bis zu 1,5 Tonnen an der Außenstruktur.
Durch den großen Arbeitsraum und Dynamikumfang eignet sich der Simulator für ein breites Anwendungsspektrum aus dem Bereich der virtuellen Realität (VR). Hierzu zählen zum Beispiel Fahr- und Flugsimulationen sowie die Erforschung grundlegender Wahrnehmungsprozesse beim Menschen. »Dieser Simulator bietet uns völlig neue Möglichkeiten, die Bewegungswahrnehmung und mögliche Anwendung in der neurologischen Forschung bei Gleichgewichtsstörungen zu studieren«, so der langjährige Wahrnehmungsforscher Bülthoff.
Erfolgreiche Zusammenarbeit
Die Kooperation zwischen Fraunhofer- und Max-Planck-Instituten hat bereits Tradition. »Mit dem Seilsimulator haben die Wissenschaftler beider Institute wieder einmal gezeigt, wie die Kombination aus Grundlagenforschung und industrienaher Technologieentwicklung zu innovativen Produkten führen kann«, betont Professor Thomas Bauernhansl, Institutsleiter des Fraunhofer IPA.