 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPAModularer Feldroboter im Praxistest
Moderne Unkrautregulierung in der Landwirtschaft
Mühsames, kosten- und zeitintensives Unkrautjäten von Hand könnte in der Land- und Forstwirtschaft schon bald der Vergangenheit angehören: Wissenschaftler am Fraunhofer IPA haben zusammen mit Projektpartnern eine Automatisierungslösung entwickelt, die Unkraut entfernt und gleichzeitig die Erde um die Pflanzen herum auflockert und sie so gesund hält. Bei Praxistests in der Buchsbaumaufzucht einer Baumschule hat sich die Lösung bereits erfolgreich bewährt. Sie entsteht im Rahmen des Projekts »AgriApps«, in dem die Projektpartner an App-basierten Automatisierungslösungen für die Feldbewirtschaftung arbeiten.

Kostengünstig, umweltfreundlich und nachhaltig: Das sollte eine innovative und zweckmäßige Agrartechnik in Hochlohnländern sein, um wettbewerbsfähig zu bleiben. Einen Beitrag hierzu können robuste autonome Systeme leisten, indem sie arbeitsintensive Aufgaben wie das selektive Ernten, das präzise und sparsame Spritzen und Düngen oder das mechanische Unkrautregulieren durchführen.
»Roboter in der Landwirtschaft sind im Kommen«, erklärt Martin Hägele, Leiter der Abteilung Roboter- und Assistenzsystem am Fraunhofer IPA. »Robotertechnologien wie die autonome Navigation tragen zur Automatisierung von Landmaschinen bei. Allerdings werden Robotersysteme für Aufgaben in der Landwirtschaft bislang meist als Spezialisten für klar umrissene Aufgaben und Einsatzbedingungen konzipiert. Dazu kommt, dass sie nur für saisonal begrenzte Aufgaben nutzbar sind.« Deshalb ist das Ziel der Projektpartner in »AgriApps«, Landwirtschaftsroboter weiter zu modularisieren und zu weitgehend frei konfigurierbaren Generalisten zu machen.
Eine Plattform für viele Anwendungen
Um dies zu erreichen, setzen die Wissenschaftler bei ihrem System auf das App-Konzept: Hierzu gehört die Trägerplattform »BoniRob«, die auf vier Rädern autonom durch die Aufzuchtreihen fährt. An diese Plattform können verschiedene Applikationsmodule, kurz Apps, angeschlossen werden, die landwirtschaftliche Arbeiten übernehmen. Je nach gewünschter Anwendung sind die Apps mit unterschiedlichen Sensoren und Aktoren ausgestattet. Durch Austausch der App kann die Plattform ganzjährig für saisonale Aufgaben wie das Ernten, die Schädlingsbekämpfung oder die Unkrautregulierung nutzbar gemacht werden. Dies erhöht die Auslastung der Trägerplattform – eine wesentliche Voraussetzung für die Wirtschaftlichkeit.
Präzises und flexibles Steuerungskonzept
Das im Rahmen von »AgriApps« entwickelte Applikationsmodul für die Unkrautregulierung nutzt ein optisches Sensorsystem und bildverarbeitende Software zur Objekterkennung. Basierend auf Farb-, Textur- und Tiefeninformationen unterscheidet die Software Unkraut von Buchsbäumen. Dies geschieht kontinuierlich, während die Trägerplattform durch die Aufzuchtreihen fährt.
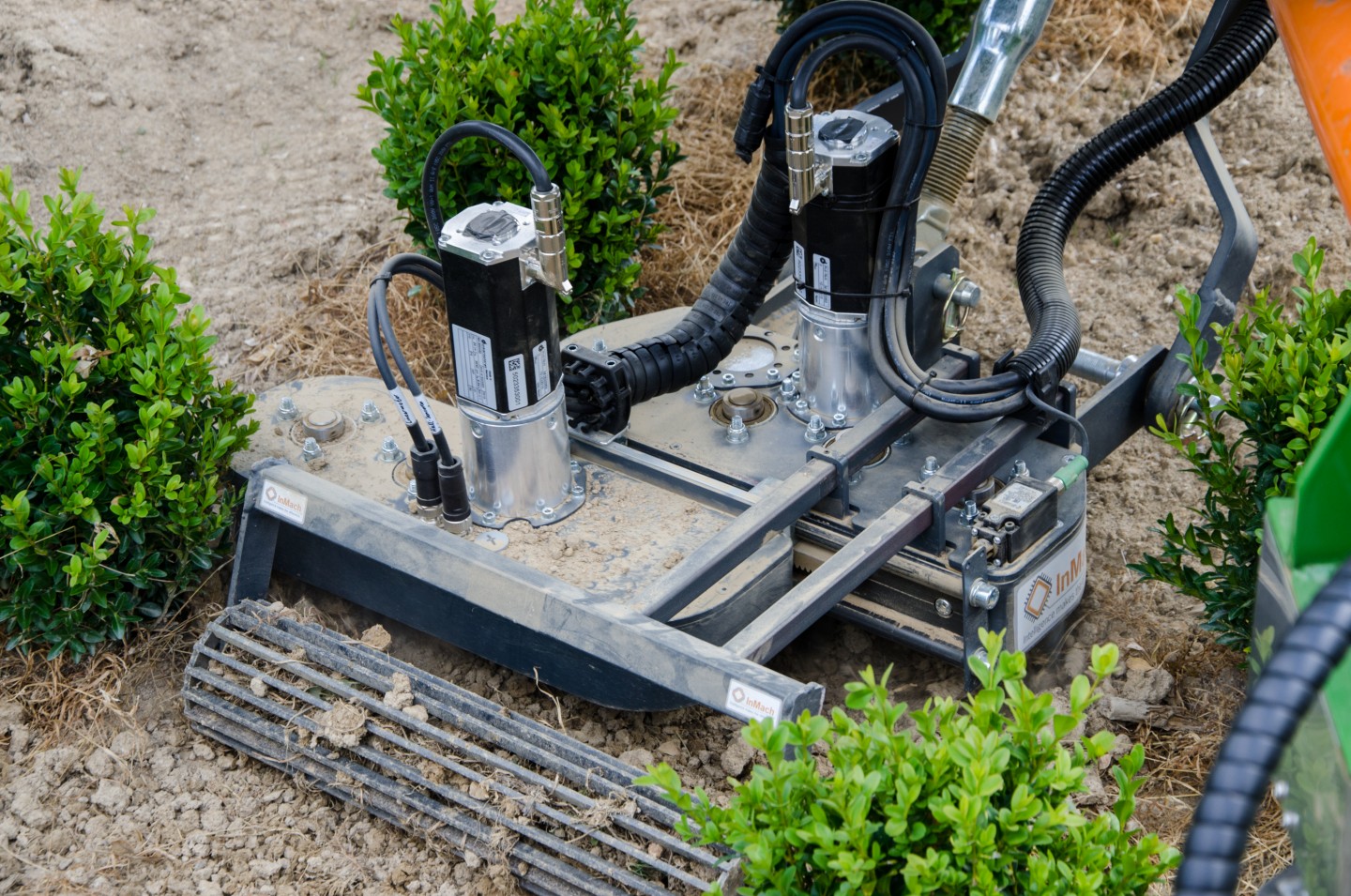
Zur mechanischen Unkrautregulierung wird der bewegliche Teil des Applikationsmoduls, der Manipulator, verwendet. Dieser bearbeitet den Boden mittels rotierender Kreiseleggen, welche von einem Ausleger mit drei Achsen geführt werden. Wie bei der Objekterkennung ist auch während der Bearbeitung kein Stoppen der Trägerplattform erforderlich. Möglich ist dies, weil die Steuerung die Bewegung des Manipulators zu jeder Zeit sowohl auf die Informationen aus der Bildverarbeitung als auch auf die Bewegung der Trägerplattform abstimmt. In den Freiräumen zwischen den Buchsbäumen fährt das Werkzeug weiter aus, um maximal viel Unkraut zu entfernen. Wird ein Buchsbaum erkannt, fährt das Werkzeug ein und wird entsprechend der Kontur des Baumes geführt, ohne diesen zu beschädigen.
Reaktive Bewegungen zwischen Plattform und Manipulator
»Durch dieses synchronisierte Steuerungskonzept erfolgt die Unkrautregulierung besonders agil und zeiteffizient«, so Felix Meßmer, Projektleiter am Fraunhofer IPA, über die wichtigste technische Komponente für das Applikationsmodul. Sie basiert auf erprobten Steuerungskonzepten mobiler Plattformen aus der Servicerobotik wie bspw. Care-O-bot® oder fahrerlosen Transportfahrzeugen für die Intralogistik.
Diese Steuerungskonzepte haben die Wissenschaftler für den Einsatz in der Landwirtschaft angepasst. So werden die reaktiven Bewegungen zwischen Plattform und Manipulator möglich, die ähnlich dem bei Landmaschinen bekannten »Tractor-Implement-Management-Systemen« entweder kompensieren oder unterstützen können: Navigiert die Plattform zur Spurhaltung etwas nach rechts und entfernt sich so vom Buchsbaum, reagiert der Manipulator, indem er das Werkzeug weiter ausfährt. Erreicht wiederum der Manipulator eine Stelle nicht, korrigiert die App-Steuerung den Kurs der Plattform, damit der Manipulator besser an das Unkraut kommt.
Als nächster Schritt sind Tests der App im Dauerbetrieb geplant. Die Technologien aus dieser Entwicklung können je nach Marktbedarf für weitere Anwendungsfälle in der Landwirtschaft genutzt werden. Zudem ist das synchronisierte Steuerungskonzept auch für industrielle Anwendungen wie mobile Produktionsassistenten einsetzbar.
Das Bundesministerium für Bildung und Forschung fördert das Kooperationsprojekt mit den folgenden Projektpartnern: InMach Intelligente Maschinen GmbH, Robert Bosch Start-up GmbH Deepfield Robotics, Fraunhofer IOSB, Fraunhofer IPA.
Weitere Informationen: http://www.ipa.fraunhofer.de/agriapps.html