Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA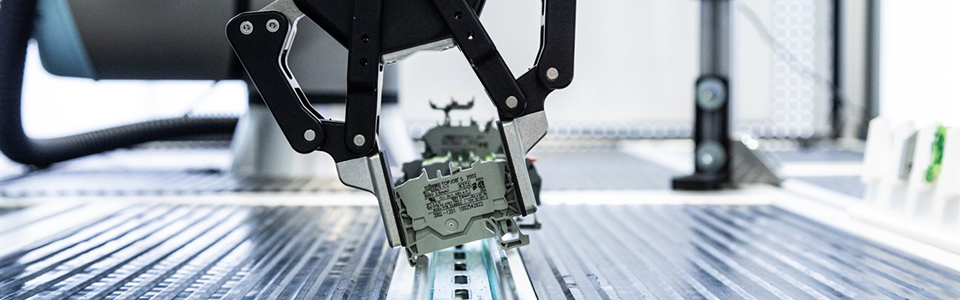
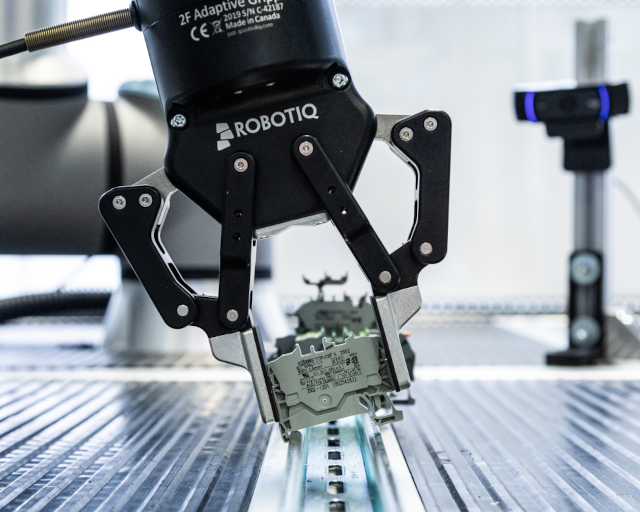
The “pitasc” software enables robots to execute force-controlled assembly processes such as clipping components onto rail mounts.
Together with WAGO, researchers from Fraunhofer IPA built a test scenario to demonstrate the extent to which robots can assemble terminal blocks on rail mounts with the “pitasc” software.
The cooperation aimed to find out whether the manual process of clipping terminal blocks onto rail mounts during the assembly of control cabinets can be automated. The highly individual and diverse requirements of the assembly process coupled with the high costs involved and limited system configurability usually make full automation of this process unprofitable. Solution approach: Why not use a standard robot that can do the job with the aid of sophisticated software? With this in mind, the project partners built a test scenario. The robot’s task was to clip WAGO terminal blocks of various sizes (nominal cross-section between 1mm² and 16 mm²) and with sometimes complex designs onto the rail mounts.
To enable standard robots to take on challenging assembly tasks of this kind, Fraunhofer IPA has developed the “pitasc” software kit. The software can be used regardless of the robot brand and can be flexibly adapted to the respective application thanks to many ready-made and reusable program modules. In addition, sensors – in the WAGO test, a force sensor integrated into the UR10e – are used to actively control process forces. What is so special about this concept is that the process is programmed from the point of view of the workpiece and that the program created is easy to adapt to new variants by updating different parameters such as gripping positions or process forces.
The test results showed that the automated process of clipping terminal blocks onto rail mounts is also technically feasible using standardized robot systems and terminals. Thanks to “pitasc”, the robot was able to mount all the terminals successfully without the need for any time-consuming reprogramming when the terminal variant changed. “Pitasc” thus facilitates the handling of diverse product variants and demanding assembly processes while keeping investment costs at an acceptable level.
If your use case also calls for a tailored gripping solution, feel free to get in touch with us.
“Our experience with customers makes it clear that numerous individual requirements have to be taken into account when automating control cabinet production. The project results demonstrate that the answer can be quite simple if standard hardware is combined with smart software.”
Michael Dörbaum
Team Leader Product Management Switch Cabinet Components at WAGO