 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA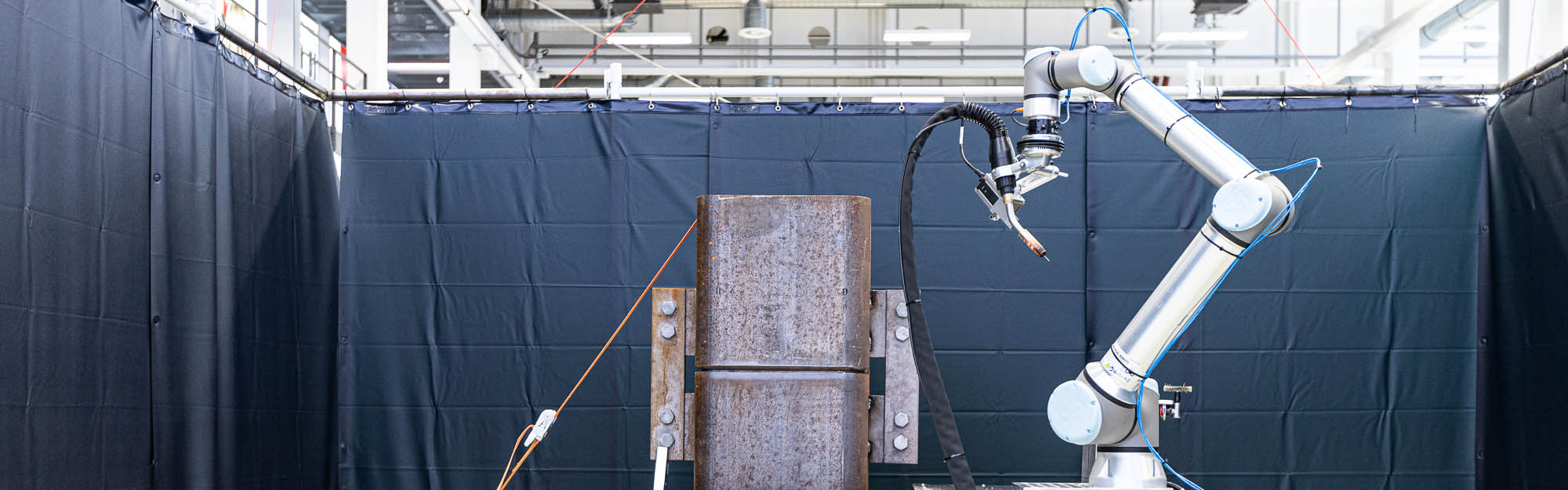
Movable robot system prototype for automatic multi-layer welding in the construction industry.
Takenaka is welding structural columns in skyscrapers. Fraunhofer IPA developed a prototype and software for autonomous robotic welding on construction sites. The included robot programming system is based on ROS for collision-avoidance, laser-scanner based column localization and tool-changer handling. The proof of concept for autonomous multi-layer welding was demonstrated with real welding tests in lab.
For autonomous welding on construction sites, custom welding automation solutions such as welding gun mounted on a linear track but lack flexibility and welding quality. Qualified welders are difficult to find and multi-layer welding on construction site is a tedious process. Takenaka wishes a flexible robot system minimizing human intervention in the multi-layer welding process.
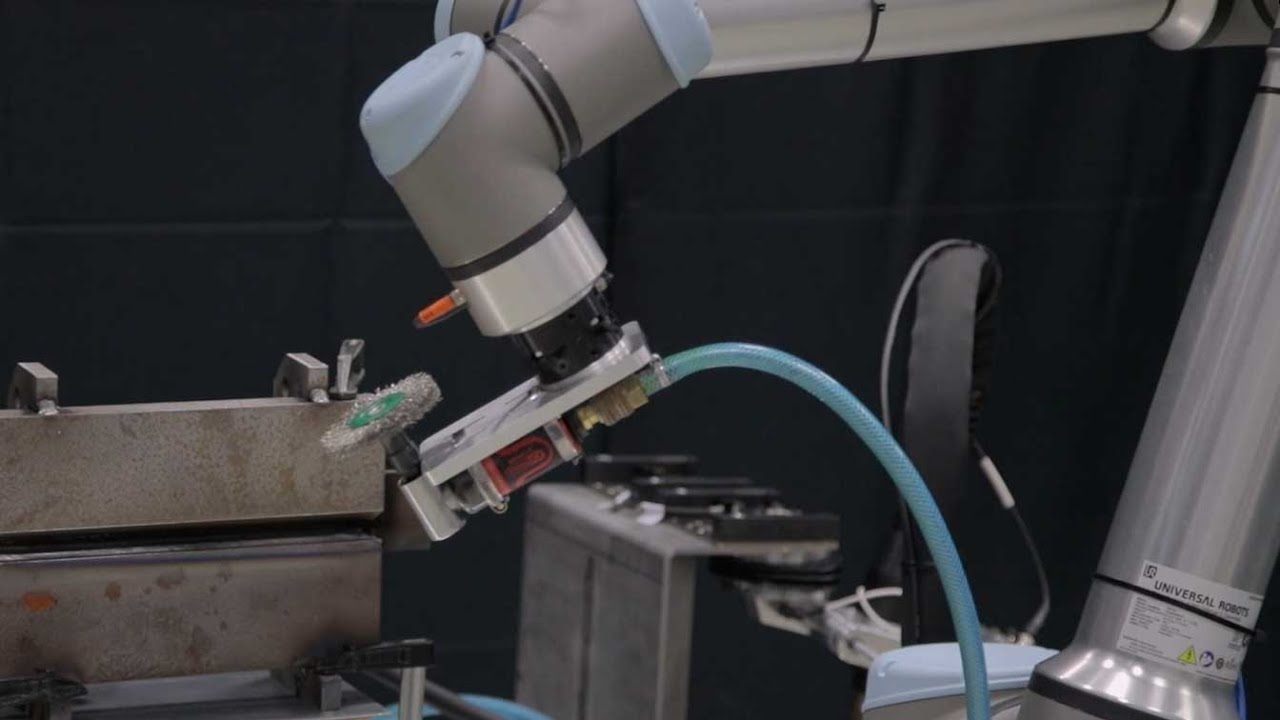
We defined the constraints related to a robotic system on construction site and related to the multi-layer welding process. Robotic multi-layer welding tests were carried out on test pieces reflecting the column joint geometry. Welding parameters such as gas, wire material composition, welding gun orientation and speed were optimized to lower the slag deposition. We determined the best solution to remove the small slag and spatters remaining. Robot simulation allowed to select a robot with appropriate reach and payload.
The software prototype for automatic robot operation is based on ROS and allows for intuitive, adaptive, collision-free programming of welding seams. The welding, workpiece localization, tool-changing and slag-removal processes are all integrated in one software.
In a final phase, we integrated the hardware and software for the prototype to be operational for welding, scanning and slag removal on the single-bevel butt joint. The experimental welding parameters allowed to weld a test piece with minimal adaptation.
11/2019-03/2021
Prototype for welding-as-a-service on construction site


