 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA
The Robotic Mobility Assistant is designed to promote independence and safety in the home.
In the SOCRATES project, Fraunhofer IPA developed new hardware and software solutions for assisting elderly people in their homes. The results of the project are a Robotic Mobility Assistant and algorithms for vision-based action recognition.
As the number of elderly people rises in many countries, so also does the need for care workers. To relieve the burden on the care system, it is crucial that people live longer at home and retain as much independence as possible. This reduces the workload of care workers and other people involved. Service robots can significantly contribute to this goal by helping with physical tasks that could lead to critical safety situations, for example if a frail person falls over while walking around in the home. Ideally, these robots provide proactive assistance whenever help is needed.
SOCRATES was a Marie Skłodowska-Curie Innovative Training Network (ITN) funded by the European Commission. The focus of the individual research projects of the funded PhD positions was on social robots and their ability to interact with the elderly or other people in need of assistance. Specific developments at Fraunhofer IPA comprise the development of a new assistive robot for the elderly called the Robotic Mobility Assistant. Fraunhofer IPA also developed advanced action recognition algorithms for service robots, which allows them to comprehend what a person is doing and correctly interpret his/her movements.
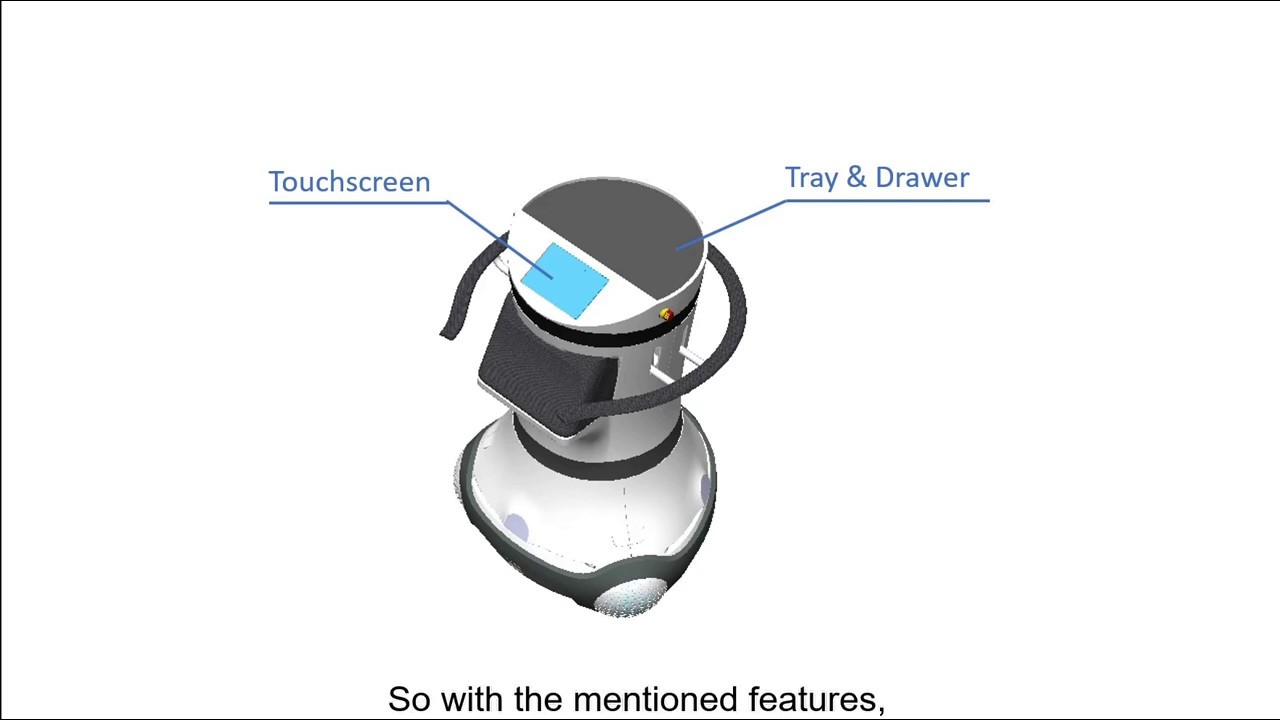
In the project, Fraunhofer IPA enhanced its expertise in computer vision and service robotics to solve the Robotic Mobility Assistant's challenging physical assistance task. The Robotic Mobility Assistant is a mobile robot that can observe people and, if necessary, actively provide them with physical support while moving around the home. The user can lean on the robot to take a rest or hold onto the fitted rails for support. The robot can also carry objects. To understand when and what type of assistance is required, the robot uses incoming visual data from its cameras to comprehend the user’s actions. For instance, if the user is staggering, the robot moves to the person to offer physical support.
Fraunhofer IPA offers different versions of the action recognition algorithms, e.g. for industrial use cases to monitor the correct execution of a task. If your robot application involves people and requires human sensing, feel free to approach us about a possible collaboration.

The SOCRATES project: How do robots help humans?
The SOCRATES project: Adaptive Hardware Design of the Robotic Mobility Assistant