#2 Seilrobotik: Bewegungssimulationen auf höchstem Niveau
Seilroboter ermöglichen Automatisierungslösungen, deren Arbeitsraum und Geschwindigkeit neue Maßstäbe setzen und so ganz neue Anwendungen ermöglichen. Noch dieses Jahr wird das Fraunhofer IPA den auf dieser Technologie basierenden »Cable Robot Simulator« anbieten, mit dem sogar Personen fahren und Bewegungssimulation in neuen Dimensionen erleben können.
Ein Seilroboter ist ein Roboter abseits des Gewöhnlichen: Es braucht für seinen Aufbau nur eine Tragstruktur wie eine Wand oder einen Rahmen aus beliebigem Material individueller Größe sowie Seile, die alle jeweils an einem Ende mit einem Endeffektor oder einer Plattform und am anderen Ende mit einer Seilwinde verbunden sind. Die Seilwinden regeln die Längen der Seile mithilfe von Servomotoren, um eine dynamische Bewegung der Plattform zu ermöglichen. Je nachdem, wie das System programmiert ist, wie die Seile also gewickelt werden und die Plattform »führen«, wird sie bewegt oder auch auf ihrer Position fixiert. Dabei kann die Plattform beispielsweise zum Transport von Objekten genutzt oder ganz durch einen zu bewegenden Gegenstand wie ein Werkzeug oder sogar eine Transportkabine für Menschen ersetzt werden – doch dazu später mehr.
Eigenschaften von Seilrobotern
Bekannt ist die Seilroboter-Technologie beispielsweise aus Fußballstadien, wo sie die Spidercam oder auch Skycam über dem Spielfeld bewegt. Die Montage von großen Bauteilen wie Solarzellen oder Häuserfassaden ist ebenfalls mit Seilrobotern möglich. Auf der Expo 2015 in Mailand agierten Seilroboter im Deutschen Pavillon über den Köpfen der Gäste für eine Musikperformance. Für die Universität Ulm wurde ein Seilroboter gebaut, der seine Plattform lautlos bewegen kann. Er dient dazu, das menschliche räumliche Hören zu erforschen.
Am Fraunhofer IPA sind Seilroboter bereits seit etwa 15 Jahren für ganz unterschiedliche Anwendungsszenarien aufgebaut und forschungsseitig kontinuierlich weiterentwickelt worden. Dabei adressieren sie Automatisierungsbedarfe, die klassische Robotersysteme aufgrund ihrer Bau- und Arbeitsweise bisher nicht abdecken können.
Seilroboter zeichnen sich insbesondere durch sechs Aspekte aus:
- Arbeitsraum: Die meisten Robotersysteme sind durch ihren Hardwareaufbau in ihrer Reichweite relativ begrenzt. Seilroboter hingegen lassen sich mit dem gleichen Hardware-Set in verschiedensten Größen aufbauen. Das kann bei einem Aufbau beginnen, der auf einen gewöhnlichen Tisch passt, und bis zur Größe einer Werkshalle reichen.
- Bauform: Auch diese ist variabel. Typischerweise ist ein Seilroboter vollverspannt, das heißt, er nutzt insgesamt acht Seile. Er kann aber auch ähnlich einem Deltaroboter aufgebaut sein, dann genügen drei Seile.
- Lasten: Seilroboter können aufgrund der effizienten Kraftübertragung durch die Seile Lasten von mehreren Hundert Gramm bis zu mehreren Tonnen stemmen.
- Steuerung: Seilroboter lassen sich schnell aufbauen, sind mobil und energieeffizient, weil sie eine geringe Eigenmasse haben. Zur Steuerung wird eine echtzeitfähige CNC-Steuerung genutzt. Mittels einer speicherprogrammierbaren Steuerung kann ein Seilroboter einfach in bestehende Anlagen integriert werden.
- Dynamik: Dieser fünfte Aspekt ist wohl der bemerkenswerteste, denn Seilroboter bieten aufgrund ihrer parallelen Kinematik sehr hohe Beschleunigungen. So erreichte bereits der erste, am Fraunhofer IPA aufgebaute Seilroboter die zehnfache Erdbeschleunigung oder zehn Meter pro Sekunde.
- Modularer Aufbau: Seilroboter bestehen aus modularen Komponenten, die für jede Anwendung angepasst werden können. Dadurch ist es u. a. möglich, die Motoren weit entfernt von der Plattform zu positionieren. Dies kann wertvoll sein, wenn die Plattform zum Beispiel Unterwasser oder lautlos bewegt werden soll.
Auch der heutige Leiter der Abteilung Roboter- und Assistenzsysteme, Dr. Werner Kraus, hat die Seilrobotik in seiner Laufbahn am Fraunhofer IPA intensiv begleitet und dazu geforscht, unter anderem im Rahmen seiner Doktorarbeit. Er sagt: »Aus meinen umfangreichen Arbeiten rund um Seilroboter habe ich insbesondere gelernt, dass sie Spezialisten für extreme Anforderungen sind, denen klassische Industrieroboter nicht gewachsen sind. Das gilt eben besonders für die Kriterien Beschleunigungen, Geschwindigkeit und Arbeitsraum.«
Seilroboter für Bewegungssimulation
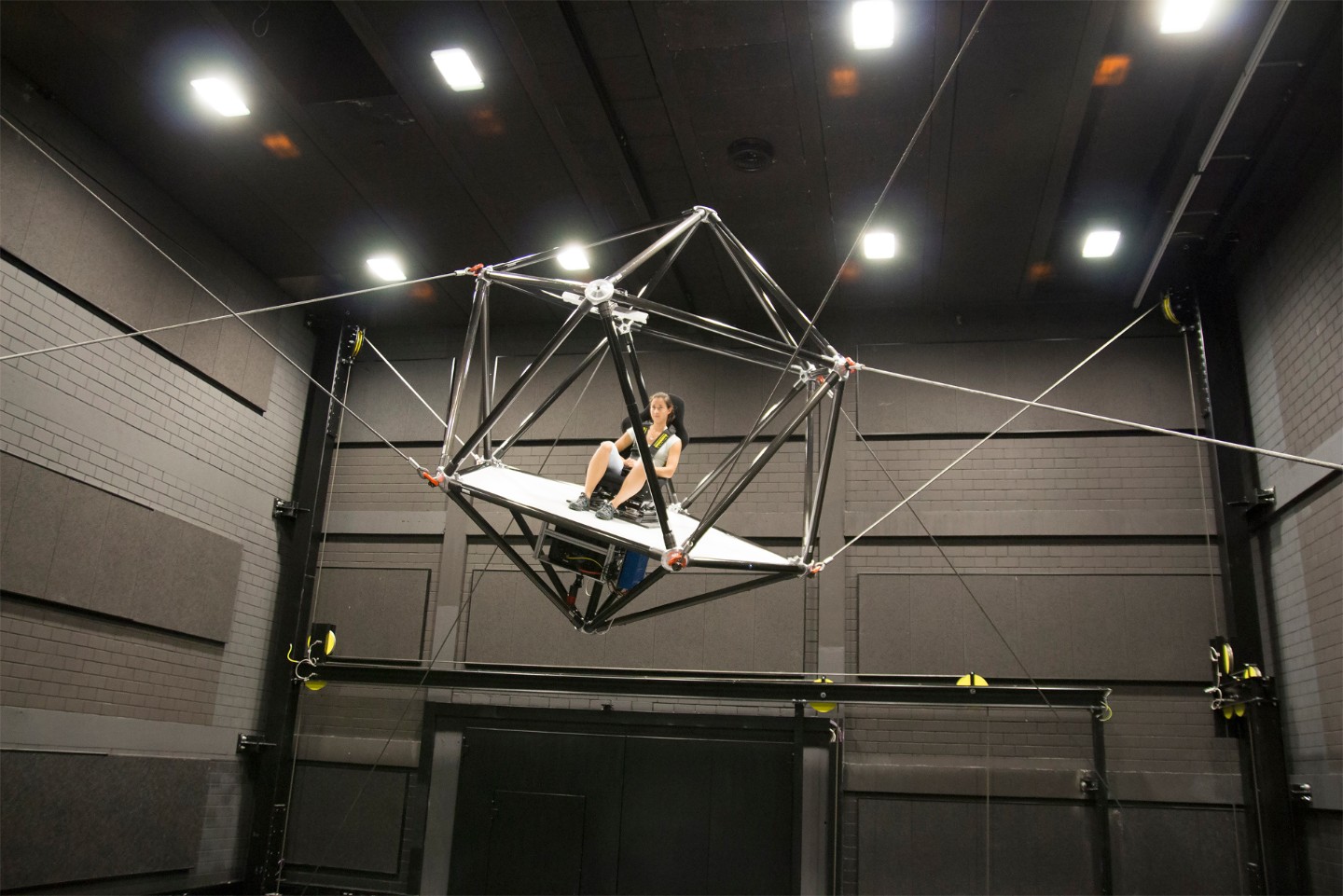
Diese Eigenschaften von Seilrobotern führten ab dem Jahr 2015 zu einem besonderen Kooperationsprojekt zwischen dem Fraunhofer IPA und dem Max-Planck-Institut für biologische Kybernetik in Tübingen. Dort wurde unter der Leitung des mittlerweile emeritierten Professors Heinrich Bülthoff weltweit erstmals die Idee eines seilgetriebenen Bewegungssimulators, auch »Cable Robot Simulator« genannt, realisiert. Acht Seile steuern eine Kabine, in der eine Person sitzen kann. Die bewegte Masse ist verglichen mit anderen Bewegungssimulatoren deutlich geringer und der Arbeitsraum lässt sich beliebig skalieren. 348 Kilowatt treiben die Kabine an, sodass sie die 1,5fache Erdbeschleunigung erreicht.
IPA-seitig waren der damalige Gruppenleiter und heutige Professor Andreas Pott sowie dessen Mitarbeiter Philipp Miermeister maßgeblich an der Entwicklung des Seilsimulators beteiligt. Dazu gehörte beispielsweise die Entwicklung der Steuerungsalgorithmen sowie der leichten und zugleich stabilen Kabine aus Kohlefasern. Eine Helikopterkabine kann ebenfalls genutzt werden. Darin können Projektionsflächen und mögliche Instrumentierungen dazu dienen, sehr realitätsnahe Simulationen umzusetzen. Ferner kann auch eine VR-Brille für Visualisierungen eingebunden werden. So konnte das Max-Planck-Forscherteam beispielsweise Fahr- und Flugsimulationen umsetzen oder auch grundlegende neurologische Wahrnehmungsprozesse beim Menschen erforschen.
Wieder-Inbetriebnahme des Cable Robot Simulators
Nachdem der Cable Robot Simulator einige Zeit hohe Wellen geschlagen und viel öffentliches Interesse geweckt hatte, wurde es jedoch seit der Emeritierung von Professor Bülthoff ruhig um ihn. Zudem war bis dahin keinerlei Auftragsforschung möglich gewesen, was IPA-seitig aber weiterhin von großem Interesse war. Aus diesem Grund entschied sich das Institut, den Seilsimulator abzukaufen und neu aufzubauen. Dieser Wiederaufbau läuft aktuell und erfolgt in Kooperation mit dem Institut für Flugmechanik und Flugregelung (IFR) der Universität Stuttgart. Die größte Herausforderung bei dieser Wieder-Inbetriebnahme ist die Sicherheit, damit auf der Plattform auch Personen bewegt werden dürfen.
Nach aktueller Planung wird der Cable Robot Simulator ab Herbst anderen Forschungseinrichtungen und Unternehmen zur Miete zur Verfügung stehen, sodass sie Auftragsversuche und -studien mit einer weltweit einmaligen Anlage durchführen können. »Dies bietet sich besonders im Kontext von Fahrsimulationen an, aber auch für das Testen von Sensoren oder die Evaluation technischer Systeme«, so Werner Kraus über das entstehende Angebot.
Alle Entwicklungen rund um den Seilsimulator finden sich hier. Zusätzlich gehören Konzeptstudien, Machbarkeitsuntersuchungen und Realisierungen rund um Seilroboter zum Angebot der Seilroboter-Experten am Fraunhofer IPA.
 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA