#2 Cable Robotics: Motion simulations at the highest level
Thanks to cable robots, new automation solutions are becoming possible which set new standards in terms of workspace and speed, thus enabling entirely new applications. Before the end of the year, the Cable Robot Simulator, which is based on this technology, will become available for rent from Fraunhofer IPA. It can even be used to transport people and allows them to experience motion simulation in a new dimension.
A cable robot is no ordinary robot: To set it up, it needs only a supporting structure such as a wall or frame made of any material of a particular size, and cables, each of which is connected to an end effector or platform at one end and to a cable winch at the other end. The winches adjust the lengths of the cables via servo motors so that the platform can be moved dynamically. Depending on how the system is programmed, i.e. how the cables are wound and “advance” the platform, it is either moved or fixed in position. For example, the platform can be used to transport objects, or it can be replaced entirely by an object to be moved, such as a tool or even a transport cabin for people – but more on that subject later.
Attributes of cable robots
People know about cable robots, for example, from soccer stadiums, where the robots move a Spidercam or Skycam over the playing field. Cable robots can also be used to install large components such as solar cells or house facades. In the German Pavilion at Expo 2015 in Milan, cable robots flew over the heads of guests, performing a show accompanied by music. A cable robot that can move its platform silently was built for the University of Ulm. It is used to study how humans perceive hearing in space.
At Fraunhofer IPA, cable robots have already been in use for around 15 years to study a wide variety of application scenarios and have been continuously further developed on the research side. In doing so, automation needs are addressed that cannot be realized by conventional robot systems so far due to their design and mode of operation.
Cable robots feature six particular attributes:
- Workspace: Most robotic systems have a relatively limited workspace owing to the design of their hardware. Cable robots, on the other hand, can be built in many different sizes using the same set of hardware. This starts with a setup that fits on an ordinary table and extends all the way to the size of a factory floor.
- Design: This is also variable. Typically, a cable robot is fully braced, i.e. it uses a total of eight cables. However, it can also be designed like a delta robot, meaning that only three cables are required.
- Load: Cable robots are capable of lifting loads anything from several hundred grams to several tons in weight due to the efficient transmission of power via the cables.
- Control: Cable robots can be erected quickly, are mobile and also energy-efficient because they have a low net mass. They are operated via a real-time capable CNC controller. Using a programmable logic controller, a cable robot can be easily integrated into existing facilities.
- Dynamics: This fifth attribute is probably the most remarkable, because the parallel kinematics of cable robots enables them to accelerate extremely fast. For example, the first cable robot built at Fraunhofer IPA already achieved ten-fold gravitational acceleration, or ten meters per second.
- Modular structure: Cable robots are made of modular components that can be adapted to any application. Among other things, this makes it possible to position the motors far away away from the platform. This is very useful if the platform is to be moved silently or underwater, for instance.
Dr. Werner Kraus, who is currently Head of the Department Robot and Assistive Systems, has also followed and researched cable robotics intensively during his career at Fraunhofer IPA, including when he wrote his doctoral thesis. He says: "From my comprehensive work on cable robots, I have learned in particular that they are specialists when it comes to extreme requirements that industrial robots cannot meet. This is especially true for the criteria of acceleration, speed and workspace.”
Cable robot for simulating motion
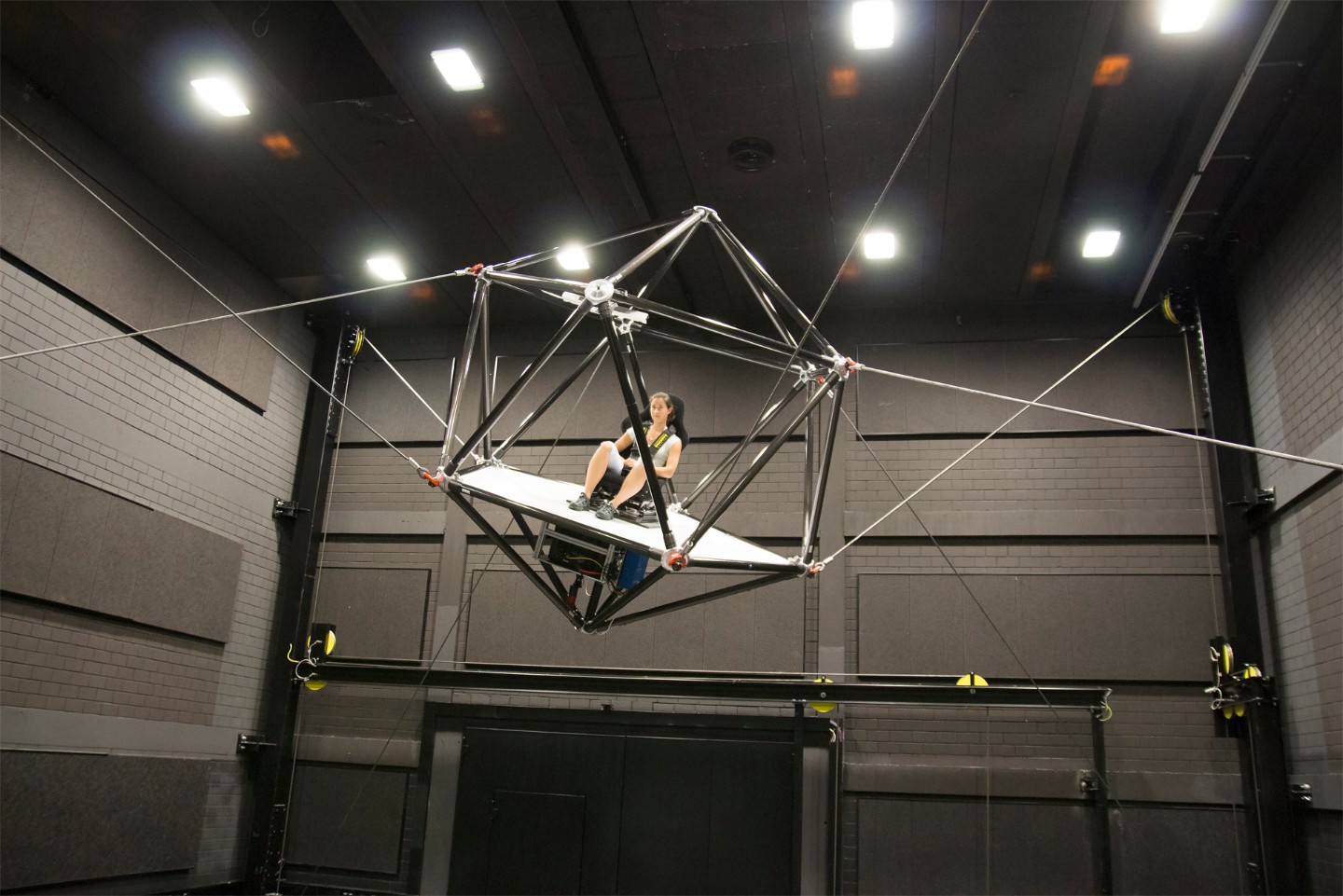
These attributes of cable robots led to a special cooperation project between Fraunhofer IPA and the Max Planck Institute for Biological Cybernetics in Tübingen that started in 2015. There, under the direction of the now-retired professor Heinrich Bülthoff, the idea of a cable-driven motion simulator, also called “Cable Robot Simulator”, was put into practice for the first time worldwide. Eight cables control a cabin which is big enough to seat one person. Compared to other motion simulators, the moving mass is much lower and the workspace can be scaled as required. 348 kilowatts propel the cabin so that it achieves 1.5 times gravitational acceleration.
On the IPA side, Andreas Pott, who was group manager back then and is now a professor, and his colleague Philipp Miermeister played a major role in the development of the cable simulator. This included, for example, the development of the control algorithms and the lightweight yet robust cabin made of carbon fiber. A helicopter cabin can also be used. In it, projection surfaces and different instrumentation can be used to conduct highly realistic simulations. There is also the option of integrating VR glasses for visualization purposes. Thus, the Max Planck research team was able to carry out driving and flight simulations or to study basic neurological perception processes in humans.
Cable Robot Simulator recommissioned
However, after the Cable Robot Simulator had made waves for some time and attracted a lot of public interest, things quietened down when Professor Bülthoff retired. In addition, no contract research had been possible up to that point, although this aspect was of great interest to IPA. Therefore, the institute decided to buy up the Cable Robot Simulator and rebuild it. It is currently being rebuilt in cooperation with the Institute of Flight Mechanics and Controls (IFR) at the University of Stuttgart. The biggest challenge in putting the robot back into operation is safety because the aim is also to move people on the platform.
Starting in the fall of this year, there are plans to make the Cable Robot Simulator available for rent to other research institutions and companies, allowing them to conduct contract tests and studies with a system that is unique in the world. “This is particularly useful when it comes to driving simulations, but also for testing sensors or evaluating technical systems”, said Werner Kraus about the upcoming plans.
All developments in conjunction with the cable simulator can be found here. The cable robot experts at Fraunhofer IPA also offer further services such as concept studies, feasibility studies and implementations involving cable robots.
 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA