 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA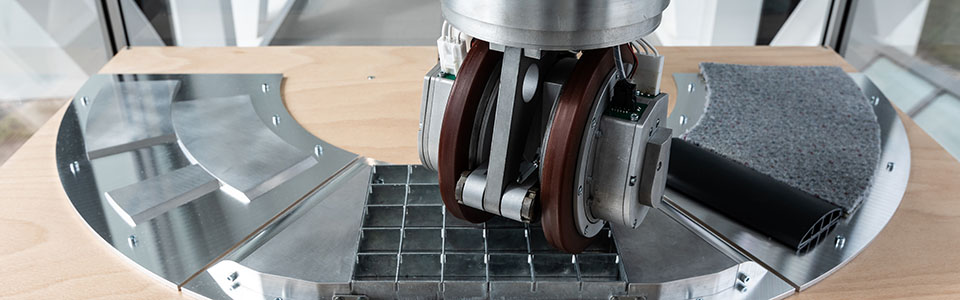
Antriebskonzepte
Reiternavigation
Kompetenzen
Ausgangssituation
Serviceroboter, die im Haushalt, in öffentlichen Umgebungen oder in der industriellen Fertigung eingesetzt werden, müssen häufig mobil sein, um ihre Aufgaben zu erfüllen. Die Wahl des Antriebskonzepts beeinflusst dabei die Fähigkeit des Roboters, zu manövrieren und sich auch auf schwierigen Untergründen stabil und zuverlässig zu bewegen. Weitere Anforderungen sind darüber hinaus:
- Ausreichende Leistungsreserven
- Geringer Bauraum und geringes Gewicht der Antriebslösung
Kompetenzen und Beispiele
Das Fraunhofer IPA beschäftigt sich seit vielen Jahren mit der Entwicklung von mobilen Roboterplattformen für Haushalts- und Industrieanwendungen. Ein Schwerpunkt sind Konzepte für omnidirektionale Antriebe und deren prototypischer Aufbau. Diese Antriebe ermöglichen ein Drehen auf der Stelle sowie ein Fahren zur Seite. So erreichen Roboter auch in engen, verwinkelten Umgebungen ohne lästige Rangierbewegungen ihr Ziel. Neben der Entwicklung von omnidirektionalen Antriebsmodulen, die sich leicht in eine Roboterplattform integrieren lassen, beschäftigt sich das Institut auch mit der optimalen Regelung solcher Fahrwerke. Ein weiterer Arbeitsschwerpunkt ist die Entwicklung von Differenzialantrieben.
Omnidirektionale Antriebe sind beispielsweise im Serviceroboter Care-O-bot® 4 des Fraunhofer IPA verbaut. Die aktuelle Generation ist zur Personenführung im Einzelhandel und anderen öffentlichen Einrichtungen kommerziell im Einsatz. Auch der robotische ServiceAssistent und der intelligente Pflegewagen nutzen die omnidirektionalen Antriebe. Der ServiceAssistent navigiert autonom in stationären Pflegeeinrichtungen, kann Patienten oder Bewohner erkennen und ihnen ein Getränk anbieten. Der Pflegewagen navigiert ebenfalls autonom in stationären Pflegeeinrichtungen und Krankenhäusern. Für alle drei Roboter ist es wichtig, dass sie auf engem Raum sicher navigieren und Hindernissen wie auf dem Flur abgestellten Transportwagen oder Betten ausweichen können. Für das Produktionsumfeld bietet das Fraunhofer IPA die flexible mobile Plattform rob@work 3, die ebenfalls die genannten Antriebe nutzt.
Der neueste Prototyp eines omnidirektionalen Antriebs eignet sich besonders für mobile, interaktive Roboter, die Lasten bis zu 100 kg transportieren sollen. Er ist kompakt, leicht zu integrieren, einfach zu regeln und robust hinsichtlich verschiedenster Untergründe.
Differenzialantriebe bieten eine geringere Manövrierfähigkeit, lassen sich aber kostengünstig umsetzen und sind daher insbesondere auch für kleine mobile Plattformen interessant. So finden sie sich unter anderem im mobilen Kommunikationassistenten MobiKa, einem kleinen Serviceroboter für verschiedenste Unterstützung im Alltag, sei es zur Interaktion mit der Außenwelt, als Notfallassistenz oder für Entertainment und Erinnerungsfunktionen.

Mit seinen omnidirektionalen Antrieben kann der robotische ServiceAssistent um Hindernisse wie Betten auf den Fluren einer Pflegeeinrichtung sicher herumfahren.
Leistungsangebote
Das Fraunhofer IPA unterstützt Sie bei der Auswahl und Entwicklung von Antriebskonzepten für Ihre individuelle mobile Anwendung. Dabei bieten wir die folgenden Dienstleistungen an:
- Beratung bei der Auswahl und Auslegung von Antrieben und mobilen Plattformen
- Machbarkeitsuntersuchungen
- Individuelle Konstruktion von Antriebslösungen für Ihren Anwendungsfall
- Aufbau von Prototypen
- Umfangreiche Softwarelösungen für die Plattformregelung und Navigationsplanung
Video
Antriebsmodulprüfstand
Weiterführende Informationen
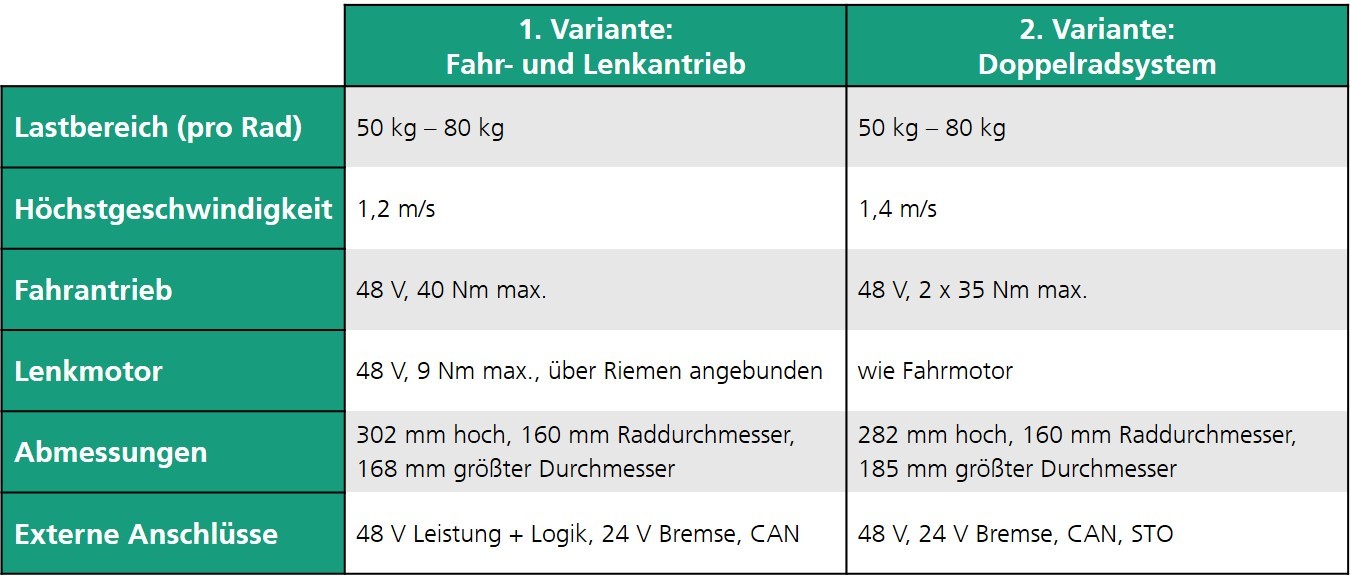
Technische Informationen zu zwei Varianten des Antriebsmoduls.
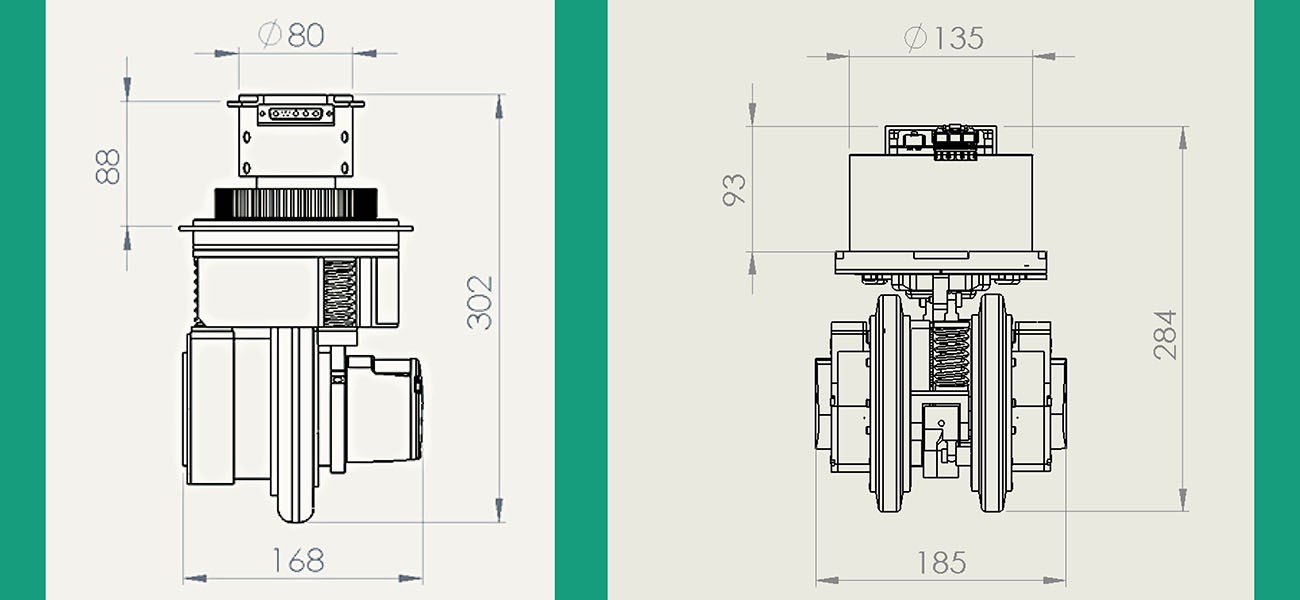
Abmessungen des Fahr- und Lenkantriebs und Abmessungen des Doppelradsystems.
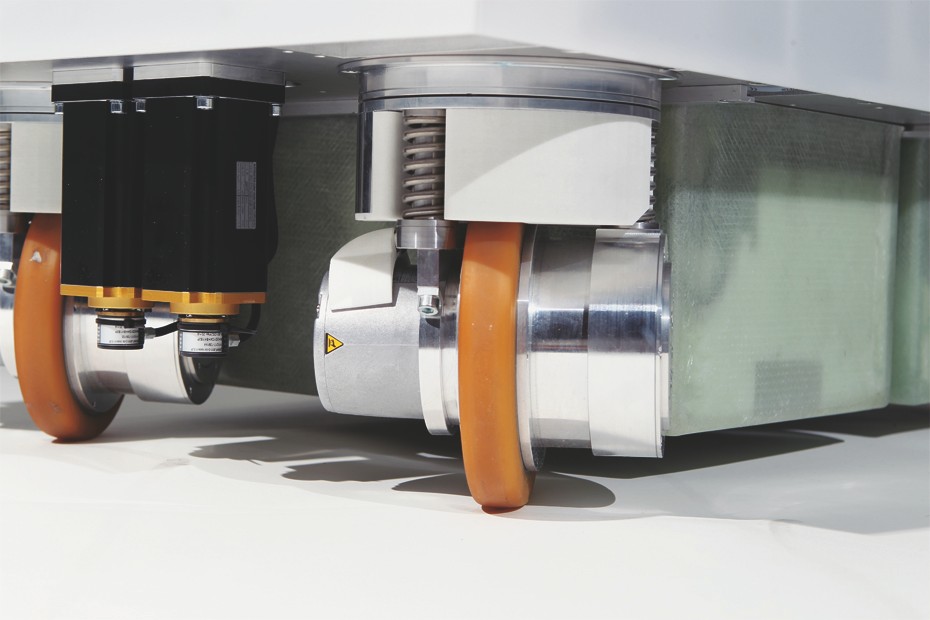
Eingebaute Antriebsmodule mit Lenkmotor.