 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA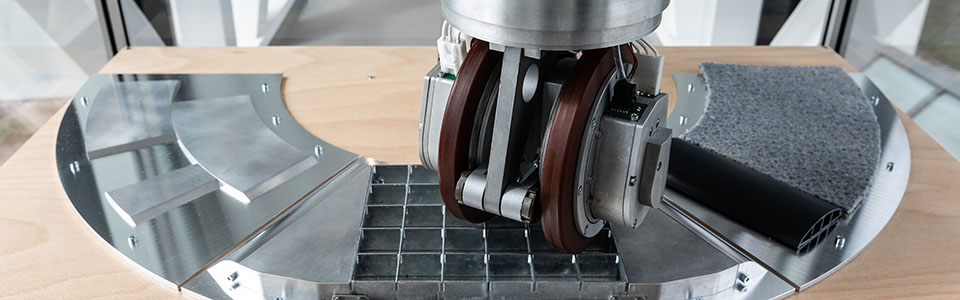
Drive Concepts
Tabbed contents
Expertise
General information
In order to perform their tasks, service robots that are used in the home, in public environments or in industrial production facilities often need to be mobile. The choice of drive concept affects the robot's ability to maneuver and to move safely and reliably even on difficult surfaces. Further requirements include:
- Sufficient power reserves
- Compact dimensions and lightweight drive system
Expertise and project examples
For many years, Fraunhofer IPA has been involved in developing mobile robot platforms for household and industrial applications. One focus is on concepts for omnidirectional drives and on constructing the respective prototypes. These drive systems enable robots to turn on the spot and move sideward. As a result, the robots can reach their destination even in narrow, winding environments without having to make complicated maneuvers. In addition to developing omnidirectional drive modules that can be easily integrated into a robot platform, the institute is also working on controlling such a robot chassis in an optimum way. A further key topic is the development of differential drives
Omnidirectional drives are installed, for example, in the Care-O-bot® 4 service robot from Fraunhofer IPA. The current generation is being used commercially to guide people around retail stores and other public facilities. The robotic ServiceAssistant and the intelligent care cart also use omnidirectional drives. The ServiceAssistant navigates autonomously in care homes and is capable of recognizing patients or residents and offering them something to drink. The care cart also navigates autonomously in care homes and hospitals. All three robots have to be able to navigate safely in confined spaces and to avoid obstacles, such as other care carts or beds parked in the corridor. For the manufacturing environment, Fraunhofer IPA offers the flexible mobile platform rob@work 3, which also employs the aforementioned drives. The latest prototype of an omnidirectional drive is particularly suitable for mobile, interactive robots that have to transport loads of up to 100kg. It is compact, easy to integrate and control, and can move over a wide range of surfaces.
Differential drives are less maneuverable but more affordable, making them a suitable alternative for installation in small mobile platforms. They are used, for example, in the mobile communication assistant MobiKa, a small service robot designed to perform a wide range of everyday support tasks, whether it is interaction with the outside world, emergency assistance, for entertainment purposes or reminder functions.

With its omnidirectional drives, the robotic ServiceAssistent can safely navigate around obstacles such as beds in the corridors of a care facility.
Services
Fraunhofer IPA helps you to select and develop the drive concepts you need for your individual mobile application. We offer the following services:
- Advice on the selection and design of drives and mobile platforms
- Feasibility studies
- Drive systems tailored to your requirements
- Construction of prototypes
- Comprehensive software solutions for platform control and navigation planning
Video
Drive module test bench
Further Information
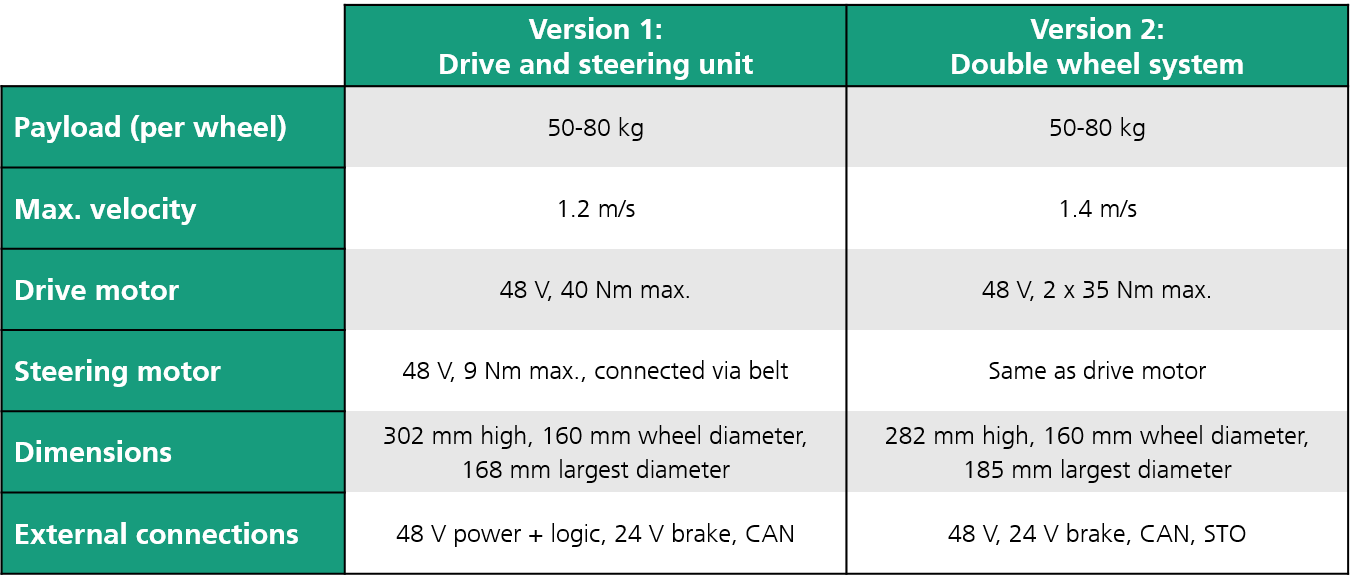
Technical data on two versions of the drive module.
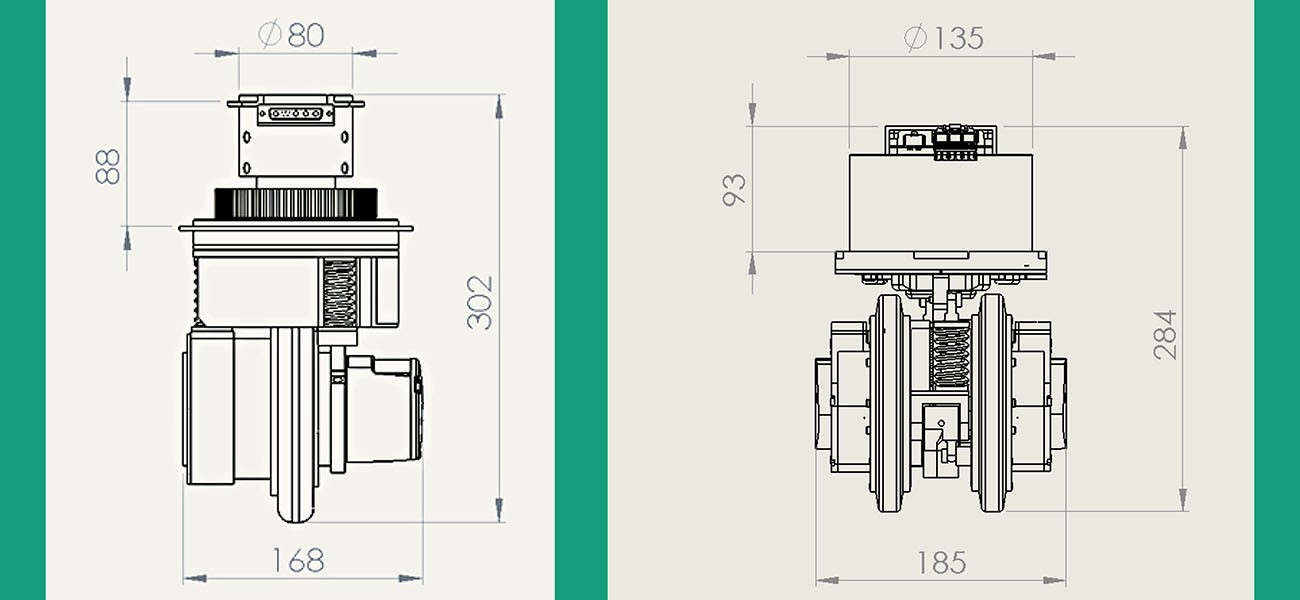
Dimensions of the drive and steering system and dimensions of the double wheel system.
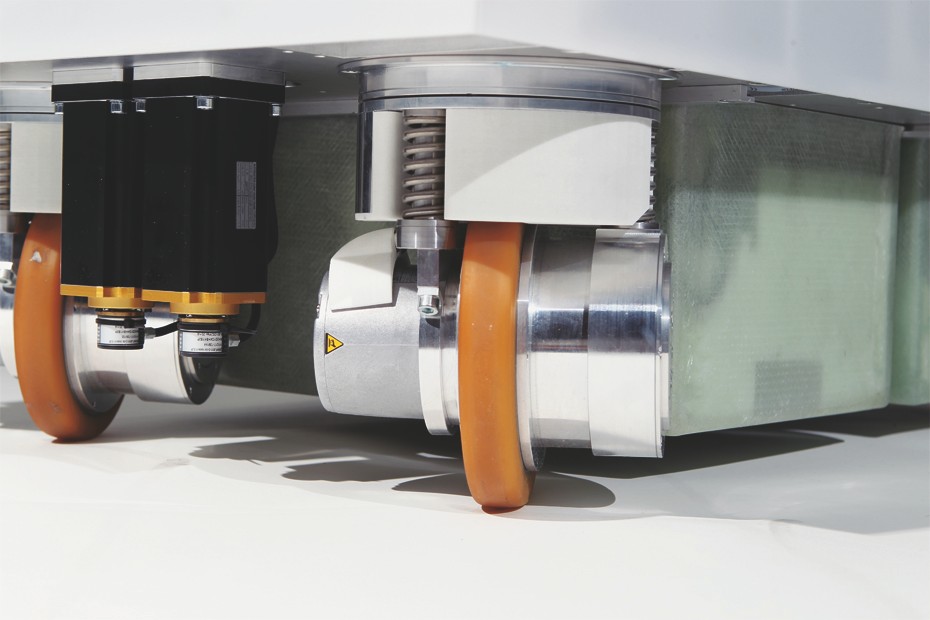
Built-in drive modules with steering motor.