 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA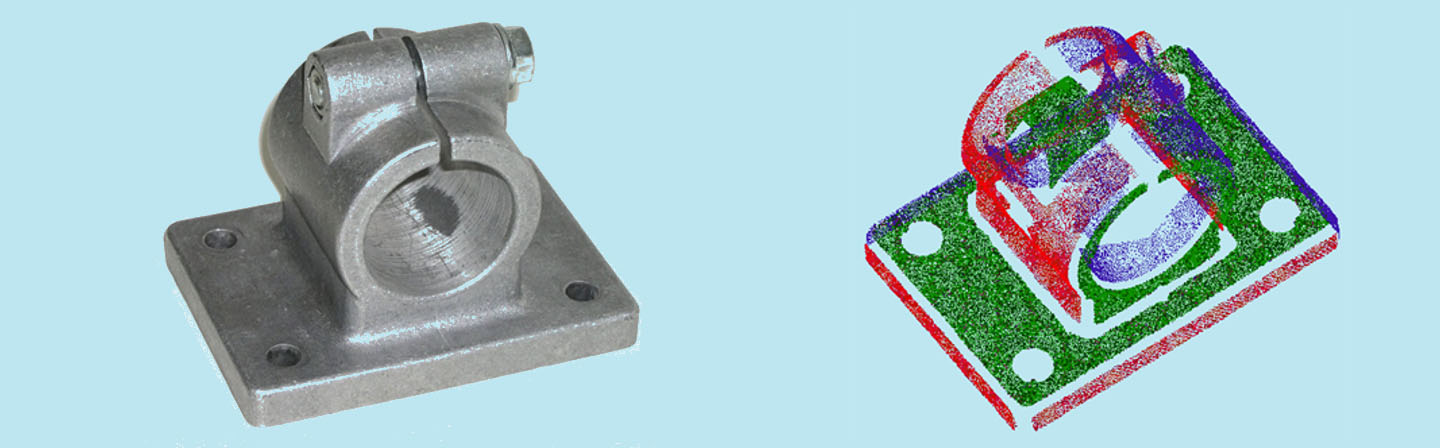
Segmentation Method
The surface of test objects can be recorded using a high number of measuring points with optical sensors, such as laser line scanners or fringe projection systems. The object’s features of interest then have to be extracted from the resulting point clouds (dimensions and position of various geometries, etc.).
To do this, the point cloud has to be efficiently segmented into subsets that correspond with the various part geometries. Key areas of application include automated component surface reconstruction in reverse engineering, the registration of production facilities in factory digitization or 3D object recognition in handling technology.
At Fraunhofer IPA, we develop different segmentation strategies to analyze and evaluate point clouds. For example, a subset of point data can be ascertained, which approximates a geometric element (plane, sphere, cylinder, cone or torus), or local curvature tests can be conducted to divide up the point cloud into areas with a similar curvature.