 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA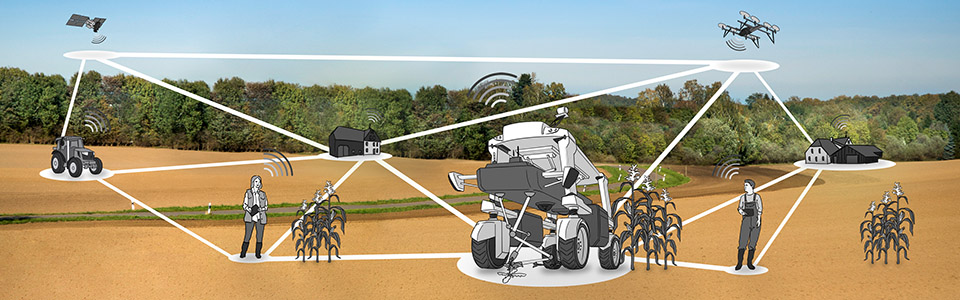
Service robots for Agriculture
Tabbed contents
Expertise
Automation for efficient farming
In agriculture, areas are increasingly cultivated in a targeted and selective manner, right up to the specific care of individual plants in the context of precision farming. To aid this, accurate information about current field conditions, such as soil and plant parameters, can be obtained from mobile field machines or stationary equipment. Here, robotics plays a key role.
Fraunhofer IPA develops and offers agricultural robotics solutions for undefined and dynamic environments, ranging from navigation software for field swarm cooperation to machine vision and new small-scale service robot concepts. The goals of each project are to achieve cost-effective final results and to transfer the developed technologies to applications.
The focus is on developing small service robots that are networked with each other and with drones. This combination creates a collective intelligence capable of making logical decisions or linking data in a meaningful way. It is hoped that such information will help all relevant actors in agriculture to make decisions, for example on the needs-based use of pesticides.
Success through artificial intelligence (AI)
Artificial intelligence is a key technology in this regard: with the aid of machine vision and neural networks designed for fields and plants, relevant information is generated and used for later processes.
The COGNAC project is bringing about trend-setting developments: the complex and highly-diverse agricultural data is recorded automatically and processed with the aim of generating benefit. Service robots for agriculture combine information with sensor platforms and specific sensor systems, which is then analyzed for immediate use by the data infrastructure of the "Agricultural Data Space" and made available to farmers.
An ongoing, successful project is "AMU-Bot": in the context of sustainable crop protection methods, the affordable, autonomous platform mechanically removes inter- and intra-row weeds. The service robot uses optical sensor technologies to detect crop plants and remove the surrounding weeds.
The Fraunhofer IPA team offers the following services:
- Execution of market, profitability and feasibility studies
- Development of prototypes, with a particular focus on small service robots for use in field swarms
- Design and implementation of specific service robot applications for individual scenarios (software and hardware), for example:
- Precision farming tasks
- Vertical farming as a vision of urban agriculture of the future
- Concepts for innovative plant cultivation methods, such as strip farming, as a contribution to greater biodiversity
- Equipping service robots with specific functional modules in the area of actuators, e.g. for weed management
- Development of customized user interfaces for farmers to facilitate the handling of digital solutions
- Optimization and adaptation of existing systems
Privacy warning
With the click on the play button an external video from www.youtube.com is loaded and started. Your data is possible transferred and stored to third party. Do not start the video if you disagree. Find more about the youtube privacy statement under the following link: https://policies.google.com/privacy»CURT« robot system for the agriculture of the future