 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA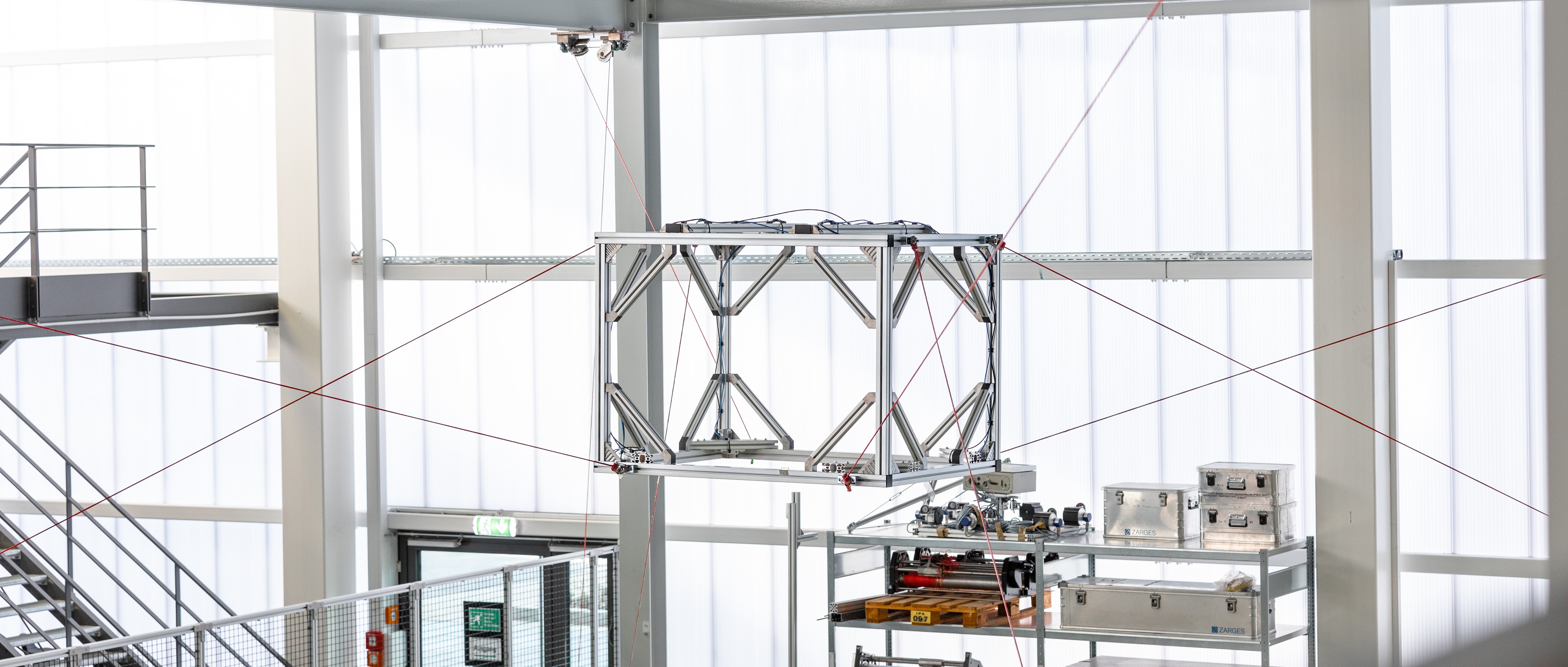
Cable-Driven Parallel Robots
Tabbed contents
Exptertise
Numerous applications in state-of-the-art production environments call for the use of robots in order to achieve short cycle times for handling tasks involving long transport distances and high speeds – with low system costs, of course. Cable-driven parallel robots are an innovative concept for automation solutions in intralogistics, even when requirements are extremely high. Fraunhofer IPA is constantly working on perfecting this technology. In terms of the size of workspaces and system costs, cable robots are clearly superior to standard robot systems. Further advantages are energy efficiency and a modular setup.
Services
- In discussions with you, we identify concepts demonstrating how the strengths of a cable-driven parallel robot can be used to improve productivity in your factory.
- Design and simulation of task-specific cable robot kinematics
- Experimental setups, realization and start-up of cable robot systems in your production facilities
Technologies and innovations
The latest development at Fraunhofer IPA is the demonstrator "IPAnema 3". Compared to conventional industrial robots, the cable-driven parallel robot IPAnema features:
- A large work space (16m x 11m x 6m)
- Depending on configurations, high speeds up to 10 m/s and extreme acceleration >10 g
- Payloads of more than 250 kg
Furthermore, these features can be individually adapted to specific requirements. The cable robot type IPAnema 3 has already been used for additive and subtractive manufacturing (see project HINDCON. The robot is controlled by a realtime-capable CNC control system that is easy to program using the tried and tested G-Code (DIN 66025). A programmable logic controller (PLC) allows an easy integration into existing systems.
Advantages of cable-driven parallel robots
Cable robots are not only extremely robust and portable but can also be implemented flexibly. This enables them to be used in a wide range of working environments. Depending on the application, a work space of up to 100 m edge length is achievable. The efficient transmission of power through the cables and the use of cable winches allow each cable to bear a load of up to several tons. In applications where safety is a critical factor, such as when lifting extremely heavy or fragile loads, additional cables can be easily added to offer more protection against the failure of individual components. Alternatively, the work space can be extended. This enables manufacturing processes involving very large components to be automated, such as rotor blades for wind turbines or aircraft fuselages.
Videos

Privacy warning
With the click on the play button an external video from www.youtube.com is loaded and started. Your data is possible transferred and stored to third party. Do not start the video if you disagree. Find more about the youtube privacy statement under the following link: https://policies.google.com/privacyIPAnema Silent: A Cable Robot for Spatial Hearing Experiments

Privacy warning
With the click on the play button an external video from www.youtube.com is loaded and started. Your data is possible transferred and stored to third party. Do not start the video if you disagree. Find more about the youtube privacy statement under the following link: https://policies.google.com/privacySeilroboter IPAnema 3
Mini Cable Robot IPAnema – Haptic Interaction using Admittance Control
MPI CableRobot Simulator