 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Separation Processes Using Robots: Bin-Picking
Tabbed contents
Expertise
In almost all areas of production, bulk goods are utilized. The various workpieces are transported loosely in boxes and processed at different stations. For this, they need to be picked up and set down in a specific place. This task still tends to be carried out manually. To automate this task, software has been developed at Fraunhofer IPA which is capable of locating workpieces in a bin, thus enabling a robot to pick them up. The position of the parts is identified using an efficient algorithm based on the respective CAD model and can be implemented for almost any component.
In order to implement such feeding systems in industry, they must fulfill high requirements. These include constant availability and reliability, as well as flexibility and easy adaptability to different objects in different positions. Fraunhofer IPA has in-depth expert knowledge in this field. We work together with you to develop new systems to meet requirements or to optimize existing systems.
Services
- Analysis of the object spectrum to be gripped
- Near-term pre-tests and feasibility studies on your components in our development center
- Provision and adaption of the software package bp3™ adapted to your needs
- Development of solution concepts for your singularization tasks (design of robot cells, drafting of user requirements and technical specifications, design of gripper systems)
- Arrangement of partners for realization as well as implementation support
Technologies and innovations
3D sensors are increasingly being used to record data, resulting in shorter cycle times with more reliable detection. The use of more powerful hardware also enables data to be analyzed in parallel. The newly-created possibility of using two-arm robots allows solutions to come even closer to meeting the cycle times demanded by modern productions.
Advantages
In combination with appropriate robot systems, the software developed by Fraunhofer IPA enables automation solutions for workpiece singularization and feeding at cost-effective prices. Compared to purely mechanical singularization processes, these systems are much more flexible and adaptable because of the software is very easy to configure.
Application examples
- Detection of large-sized cast or forged components
- Detection of flat sheet metal sections with preferred positions
- Gripping workpieces from bins, pallet cages or conveyors
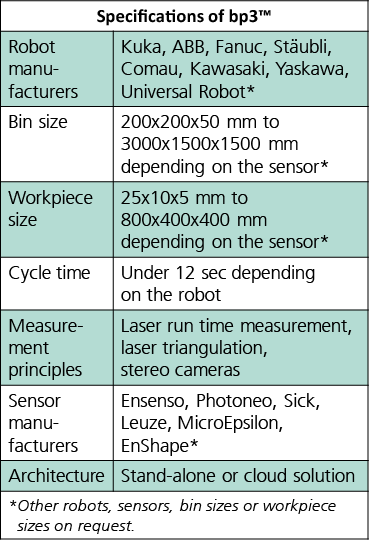
Specifications of bp3™

Privacy warning
With the click on the play button an external video from www.youtube.com is loaded and started. Your data is possible transferred and stored to third party. Do not start the video if you disagree. Find more about the youtube privacy statement under the following link: https://policies.google.com/privacyAI Picking
Bin picking 3d

Privacy warning
With the click on the play button an external video from www.youtube.com is loaded and started. Your data is possible transferred and stored to third party. Do not start the video if you disagree. Find more about the youtube privacy statement under the following link: https://policies.google.com/privacyROBOTT-NET SoSta – Easy to use multi-purpose SOrting and STAcking robot for sheet metal part