 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA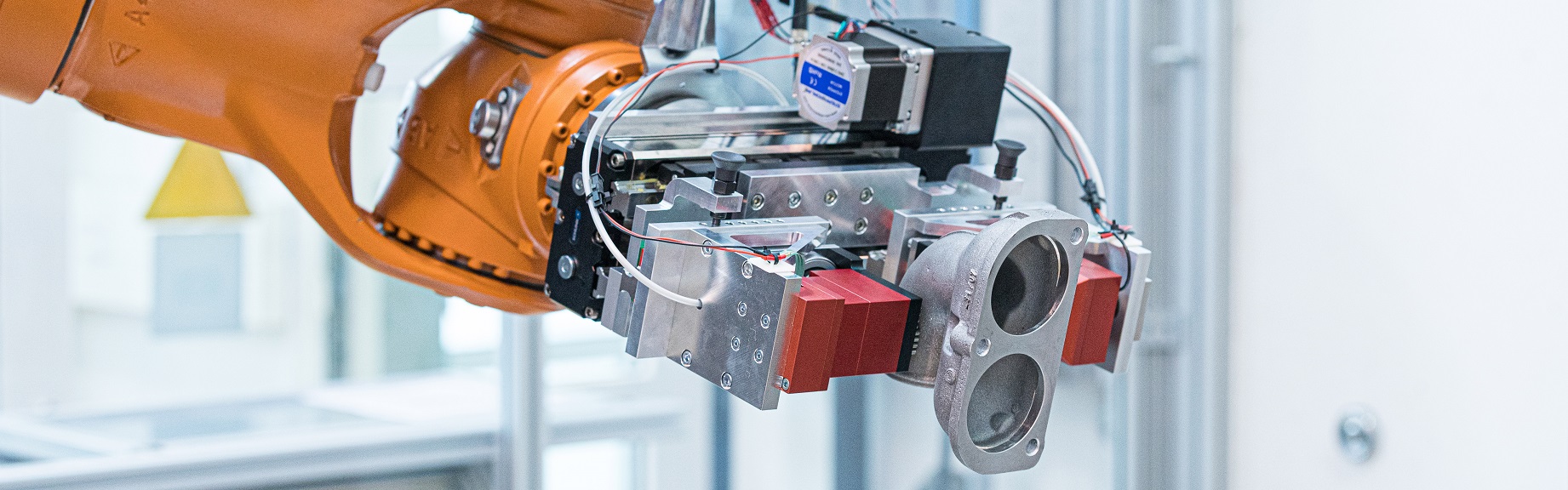
Clamping and Handling Technologies
When it comes to cutting workpieces, clamping and handling technologies tailored to the respective system are called for. This must allow workpieces to be positioned in a specific way relative to the machine tool and kept securely in place throughout the entire machining process. Particular care must be taken to ensure that the workpieces are not shifted out of their predefined position by the machining forces acting on them, that they do not start to vibrate in a highly dynamic manner, or that they are not deformed by excessive clamping forces which could impair the required accuracy and workpiece quality.
To help you select the right clamping and handling equipment, we work with you to determine process requirements. These include, for example, the necessary positioning and repeat accuracy during gripping, the clamping force required during machining, flexible and fast adaptability to different workpiece geometries, the desired degree of automation or accessibility of the clamped workpiece for the machining process. Based on the results of the requirements analysis, we then develop and implement suitable clamping and handling concepts. At the same time, we also optimize your processing steps and their order of execution. With our support, you can achieve the machining quality you need while keeping process cycles short thanks to faster changeover times and higher machining speeds.