 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA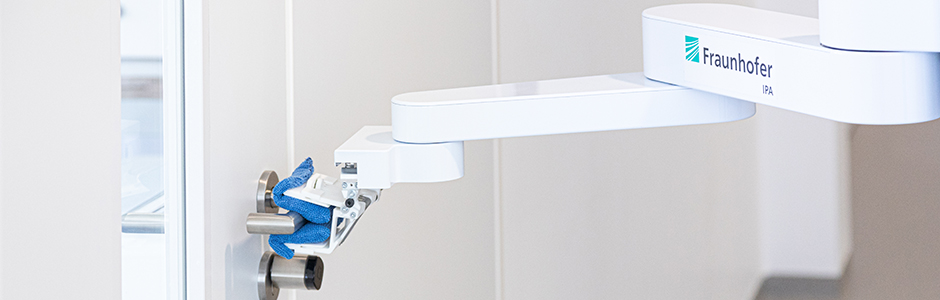
Serviceroboter für die Reinigung und Desinfektion
Reiternavigation
Kompetenzen
Ausgangssituation
Viele Reinigungsaufgaben, obwohl monoton und wiederkehrend, werden heutzutage noch immer manuell durchgeführt. Nachteile manuell bedienter Reinigungsgeräte sind jedoch die anfallenden Personalkosten einschließlich des Einarbeitungs- und Bedienungsaufwands. Die besonders hohe Personalfluktuation im Reinigungsgewerbe erfordert ständig neue Einarbeitungszeiten. Der demografische Wandel führt außerdem dazu, dass es immer weniger qualifiziertes Reinigungspersonal gibt. In sicherheitsrelevanten Bereichen benötigt man zudem sehr vertrauensvolles Personal. Durch die zunehmende Komplexität moderner Architekturen gibt es darüber hinaus immer mehr Gebäude, bei denen das Reinigungspersonal die zu reinigenden Bereiche gar nicht oder nur schwer erreichen kann.
Weitere potenzielle Einsatzfelder autonomer Reinigungslösungen betreffen industrielle Umgebungen oder Reinigungsgeräte, die für den Menschen eine Gefährdung darstellen. Hier könnte eine autonom arbeitende Arbeitsmaschine die möglichen Sicherheitsrisiken stark reduzieren. Und nicht zuletzt eignen sich auch Desinfektionsaufgaben im Zuge von Corona oder sonstigen kursierenden Krankheitserregern gut für eine Automatisierung: Personal wird nicht durch eine eventuelle Ansteckung gefährdet und die Desinfektion kann kontinuierlich, beispielsweise auch über Nacht, durchgeführt werden.
Kompetenzen und Projektbeispiele
Das Fraunhofer IPA beschäftigt sich seit vielen Jahren mit der Entwicklung relevanter Schlüsseltechnologien für die Reinigungsrobotik. Dabei geht es sowohl um die sensorische Erfassung reinigungsrelevanter Parameter als auch um die Entwicklung einer speziell für das Einsatzfeld angepassten Roboterhardware.
- Im Projekt »AutoPnP« beschäftigte sich das Fraunhofer IPA erstmals mit der Entwicklung von Lösungen, um Serviceroboter für die Reinigung von Bürogebäuden einsetzen zu können. Dafür wurde der Roboterassistent Care-O-bot® 3 mit Fähigkeiten für die zielgerichtete Bodenreinigung sowie das automatische Leeren von Papierkörben ausgestattet.
- Im Projekt »BakeR« wurden die Entwicklungen aus AutoPnP auf einen spezialisierten, modularen Reinigungsroboter transferiert und weiterentwickelt. Neben der Entwicklung einer modularen Roboterhardware wurden praxistaugliche Softwarekomponenten für die Flächenabdeckung und die Schmutz- bzw. Objekterkennung entwickelt und erfolgreich praktisch getestet.
- Als Reaktion auf die Corona-Pandemie entwickelten mehrere Abteilungen des Fraunhofer IPA den mobilen Reinigungs- und Desinfektionsroboter »DeKonBot«: Er fährt selbstständig zu potenziell kontaminierten Objekten wie Türgriffen, Lichtschaltern oder Aufzugknöpfen und führt eine effiziente Scheuer-Wischdesinfektion durch. Mithilfe eines neu entwickelten 3D-Sensors und einer automatischen Erkennung der zu reinigenden Objekte kann die Inbetriebnahme des Roboters in einer neuen Einsatzumgebung innerhalb kürzester Zeit erfolgen.
- Im Projekt »MobDi« - Mobile Desinfektion arbeitete das Fraunhofer IPA zusammen mit zehn anderen Einrichtungen der Fraunhofer-Gesellschaft daran, die Technologien von DeKonBot weiterzuentwickeln. Dabei entstand der Roboter »DeKonBot 2«, der kompakter, flexibler und produktnäher als das Vorgängermodell ist. Mit seinen Reinigungsbürsten entfernt der Roboter Schmutz von den zu reinigenden Objekten und trägt gleichzeitig flächendeckend Desinfektionsmittel auf.
- Eine spezielle Weiterentwicklung des Roboters für Einrichtungen des Gesundheitswesens findet aktuell im Projekt »RoReBO« statt. Unter anderem werden neue adaptive Reinigungswerkzeuge entwickelt und Funktionen zur Desinfektion weiterer Objekte im Krankenhaus entwickelt. Auch das selbstständige Öffnen von Türen wird im Projekts betrachtet.
Weitere Erfahrungen im Bereich der Reinigungsrobotik für den Consumer-Bereich können herangezogen werden, wenn es um den Einsatz kostengünstiger Hardwarekomponenten und entsprechend effizienter Verarbeitungsmethoden geht.
Leistungsangebot
- Analyse der Reinigungsaufgabe, Aufnahme der Randbedingungen und Anforderungen
- Konzeption von Lösungen für eine automatisierte bzw. teilautomatisierte Reinigung, Durchführung von Vorversuchen für kritische Teilsysteme, Bewertung und Auswahl des Lösungssystems
- Abstimmung der Schnittstellen mit dem Gesamtsystem bzw. dem Gebäude
- Entwicklung und Konstruktion, Software-, Hardware- und Elektronikdesign
- Realisierung (Fertigung, Montage und Programmierung), erste Testläufe von Teilsystemen und dem Gesamtsystem in einer realitätsgetreuen Testumgebung
- Entwicklung von Konzepten, mit deren Hilfe produktnahe Prototypen zur Serienreife gebracht werden können
- Einbeziehung branchenrelevanter Firmen und Nutzergruppen in den gesamten Entwicklungsprozess
- Sicherheitszertifizierung, Inbetriebnahme vor Ort, Abnahme, Nutzerschulung
Videos

Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyMobiler Roboter zur Reinigung und Desinfektion von potenziell kontaminierter Oberflächen

Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyReinigungs- und Desinfektionsroboter »DeKonBot«
